

Anytime recovery sparse A<*> and Kalman filtering-based dynamic route planning method
A Kalman filter and track planning technology, applied in non-electric variable control, three-dimensional position/track control, instruments, etc., can solve problems such as difficulty in meeting the timeliness and reliability of UAVs, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to better illustrate the purpose and advantages of the present invention, the invention will be further described in the following through the example of UAV track planning, combined with the accompanying drawings and tables, and the performance of the present invention will be analyzed.
[0059] Case number one
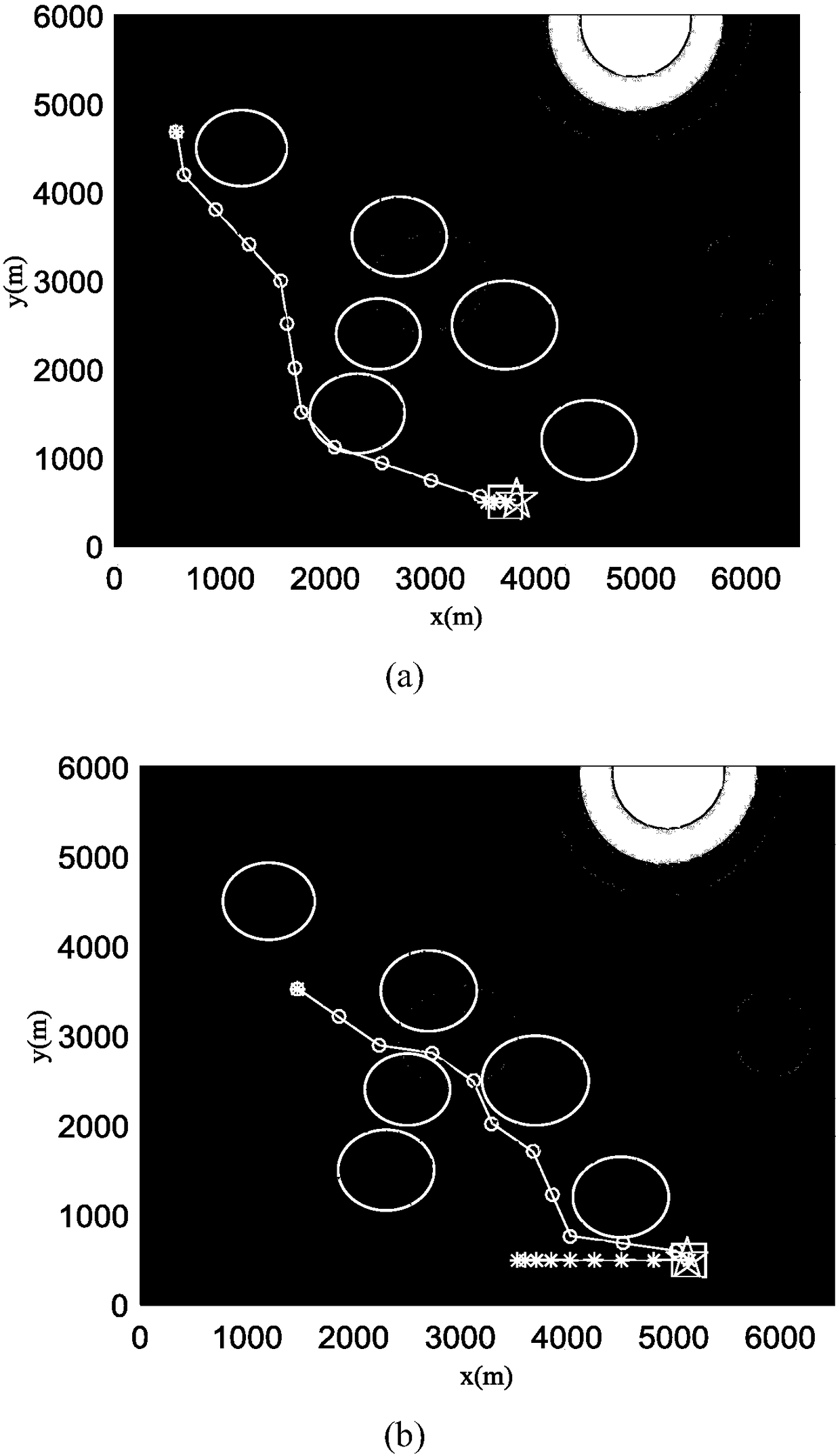
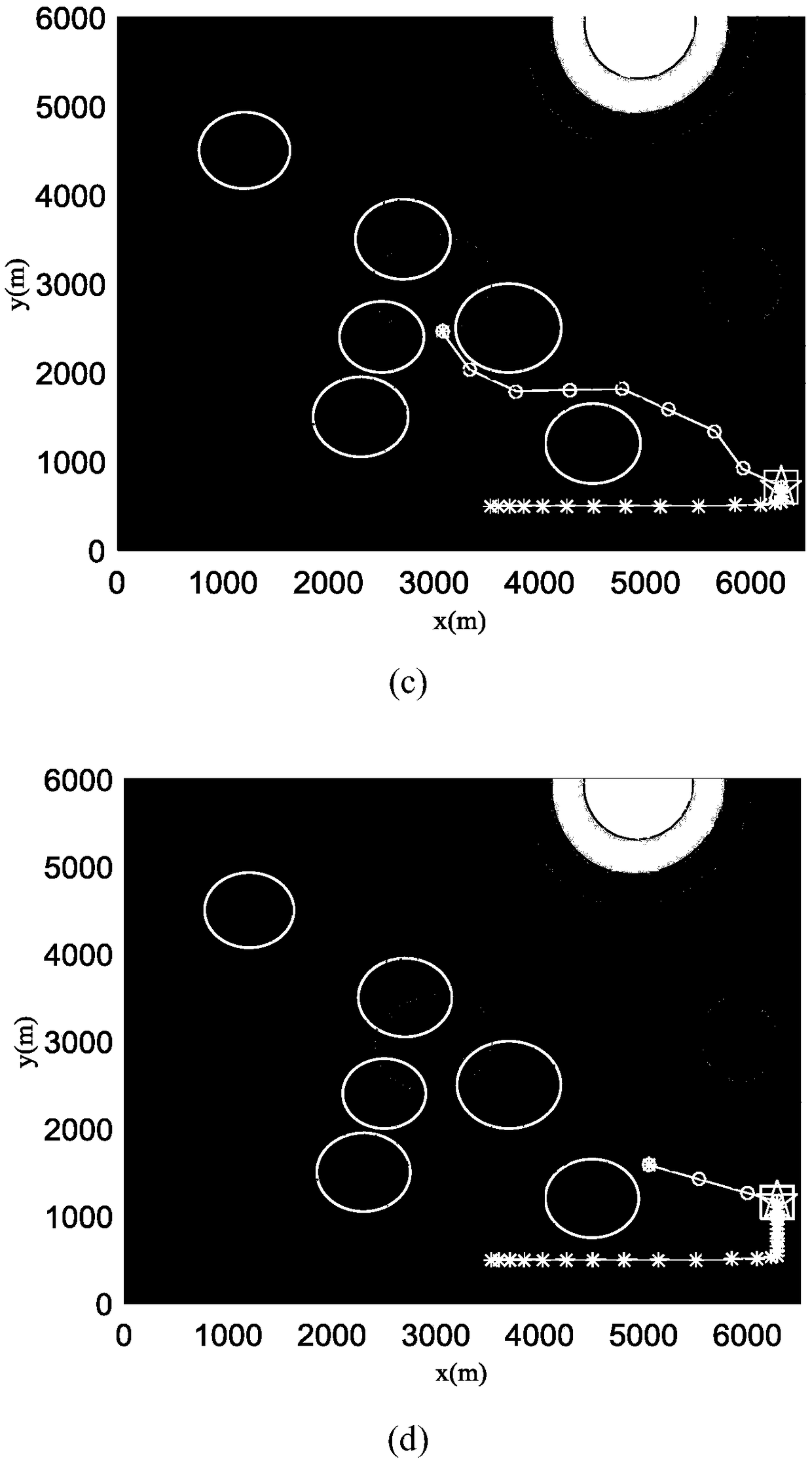
[0060] In order to verify the effectiveness of the proposed method, the algorithm proposed by the present invention is used to solve the UAV track planning problem in a dynamic environment. The simulation hardware is Inter Core i5-2310CPU 3.10 GHz 4G memory, and the simulation environment is MATLAB.
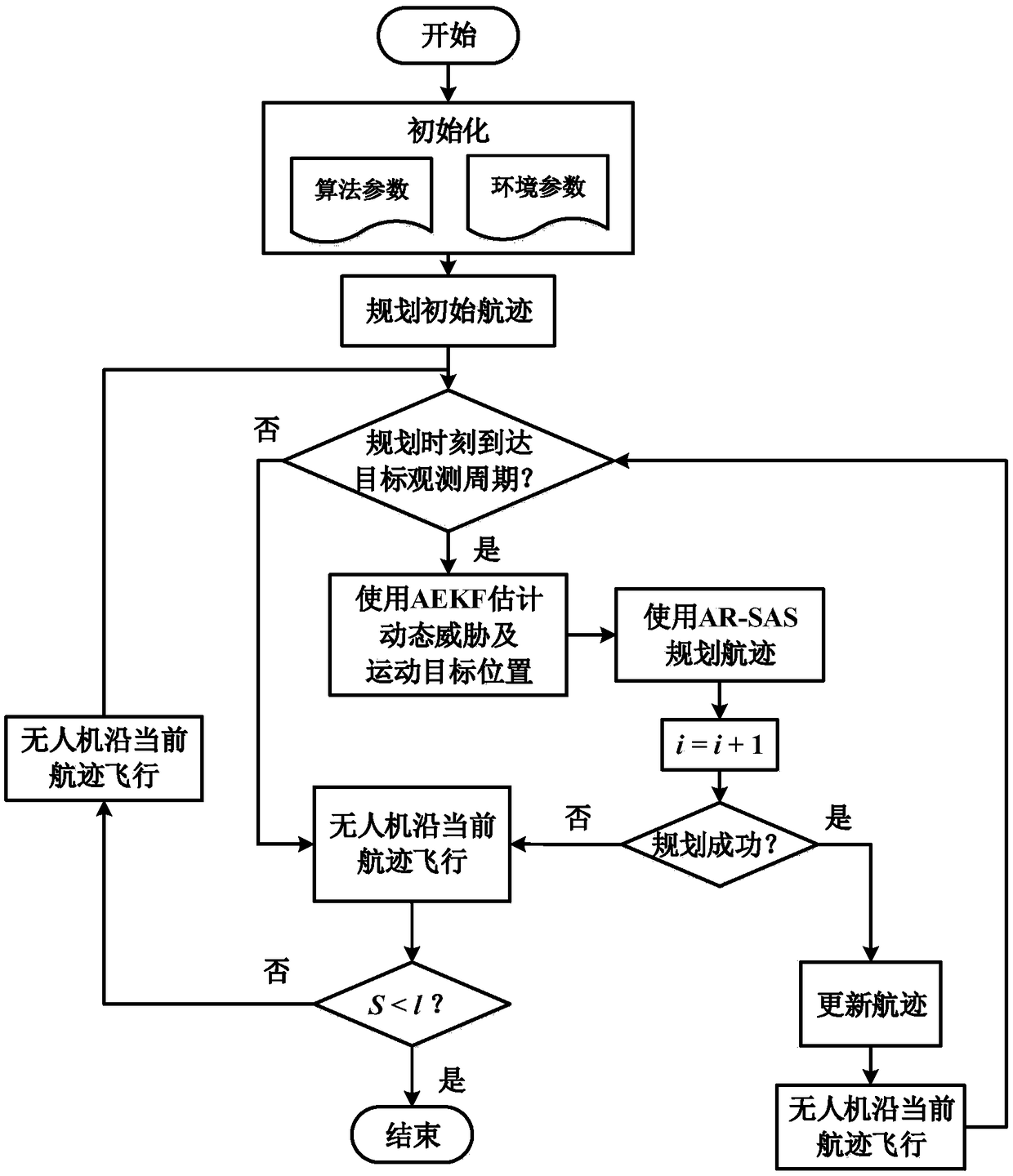
[0061] The specific implementation steps of the dynamic track planning method based on Anytime repair sparse A* and Kalman filtering disclosed in this embodiment are as follows:
[0062] Step 1. Input initial task situation information and UAV flight performance parameters.
[0063] In this example, the flight area is set to a cube area of 6km×6km×1k...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More