

Dynamic performance optimization method of six-axis industrial robot based on finite element
An industrial robot and optimization method technology, applied in design optimization/simulation, geometric CAD, special data processing applications, etc., can solve the problems of low low-order modal frequency, resonance, and low robot positioning accuracy of the whole machine, and achieve low First-order modal frequency, reducing the risk of resonance, and avoiding the effect of blindness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0028] Specific embodiment one: based on a finite element six-axis industrial robot dynamic performance optimization method comprising the following steps:
[0029] In order to facilitate the subsequent comparative evaluation of the optimization performance of the industrial robot body, the rigid dynamic model and the rigid-soft coupling dynamic model of the six-axis industrial robot are established respectively.
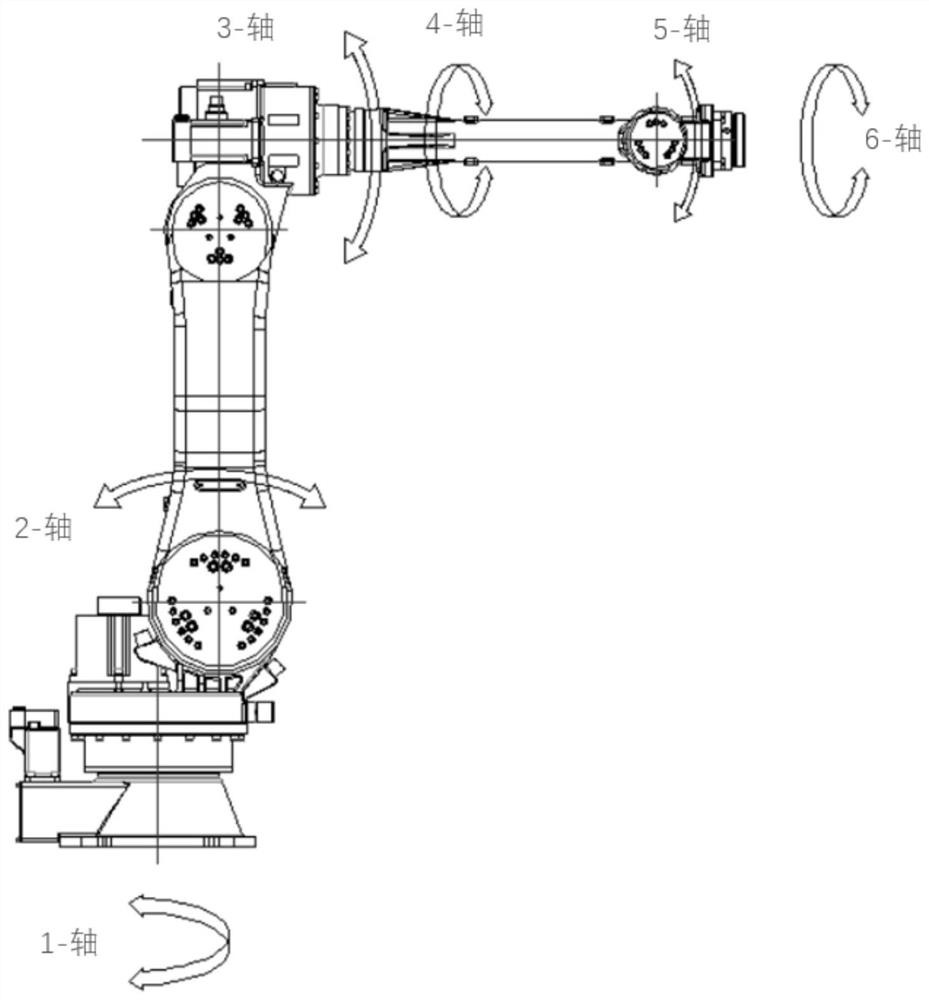
[0030] Step 1: Modal analysis of each part of the six-axis industrial robot to determine the low-order modal frequency and stiffness distribution of each part; the parts of the six-axis industrial robot include a small arm, wrist, large arm, base, elbow seat and waist seat; dynamic performance is the amplitude of the robot arm in the process of high-speed operation;
[0031]Step 2: Optimize the part with the smallest stiffness of each part according to the stiffness distribution of each part determined in step 1;
[0032] Combined with the experience of mechanical part...
specific Embodiment approach 2
[0058] Embodiment II: The present embodiment is different from the specific embodiment is: the modal analysis of each part of the six-axis industrial robot in step one using ANSYS software.
[0059] Other steps and parameters are the same as the specific embodiment.
specific Embodiment approach 3
[0060] Specific embodiment three: The present embodiment and the specific embodiment of one or two is different is: the step three in the step two of each part is optimized, the specific process of establishing a six-axis industrial robot machine finite element model is:
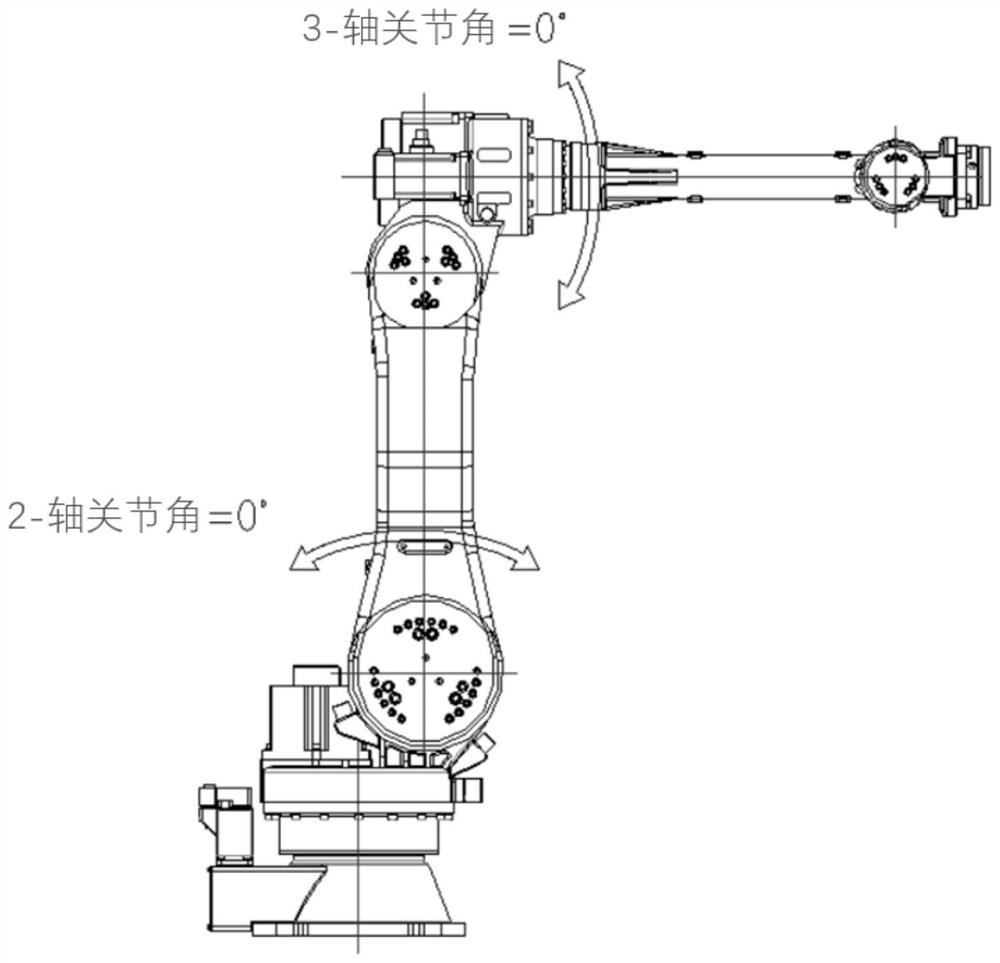
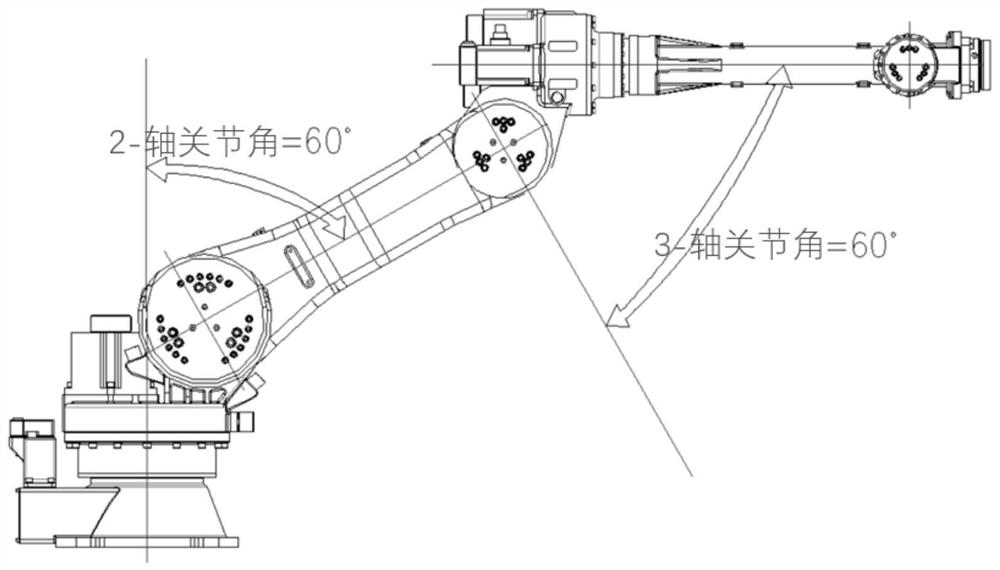
[0061] Assemble the parts of the six-axis industrial robot according to the different configurations of joint 2 (large arm swing joint) and joint 3 (small arm swing joint) in SolidWorks and generate x_t intermediate files; in Workbench, each rigid body is equivalent to the mass block according to the connection constraint with the part of the six-axis industrial robot; and the parts of each six-axis industrial robot are meshed to generate a finite element model of the whole machine;
[0062] The rigid body comprises a motor, a reducer and a driver.
[0063] Other steps and parameters are the same as the specific embodiment one or two.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More