

Drawing robot
A robot and painting technology, applied in the field of painting robots, can solve problems such as the inability to realize the control of continuous trajectory of graphics, low operating speed and controllability, and large structural errors of robots, so as to increase the scope of painting, excellent mechanical properties, The effect of high-precision motion output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
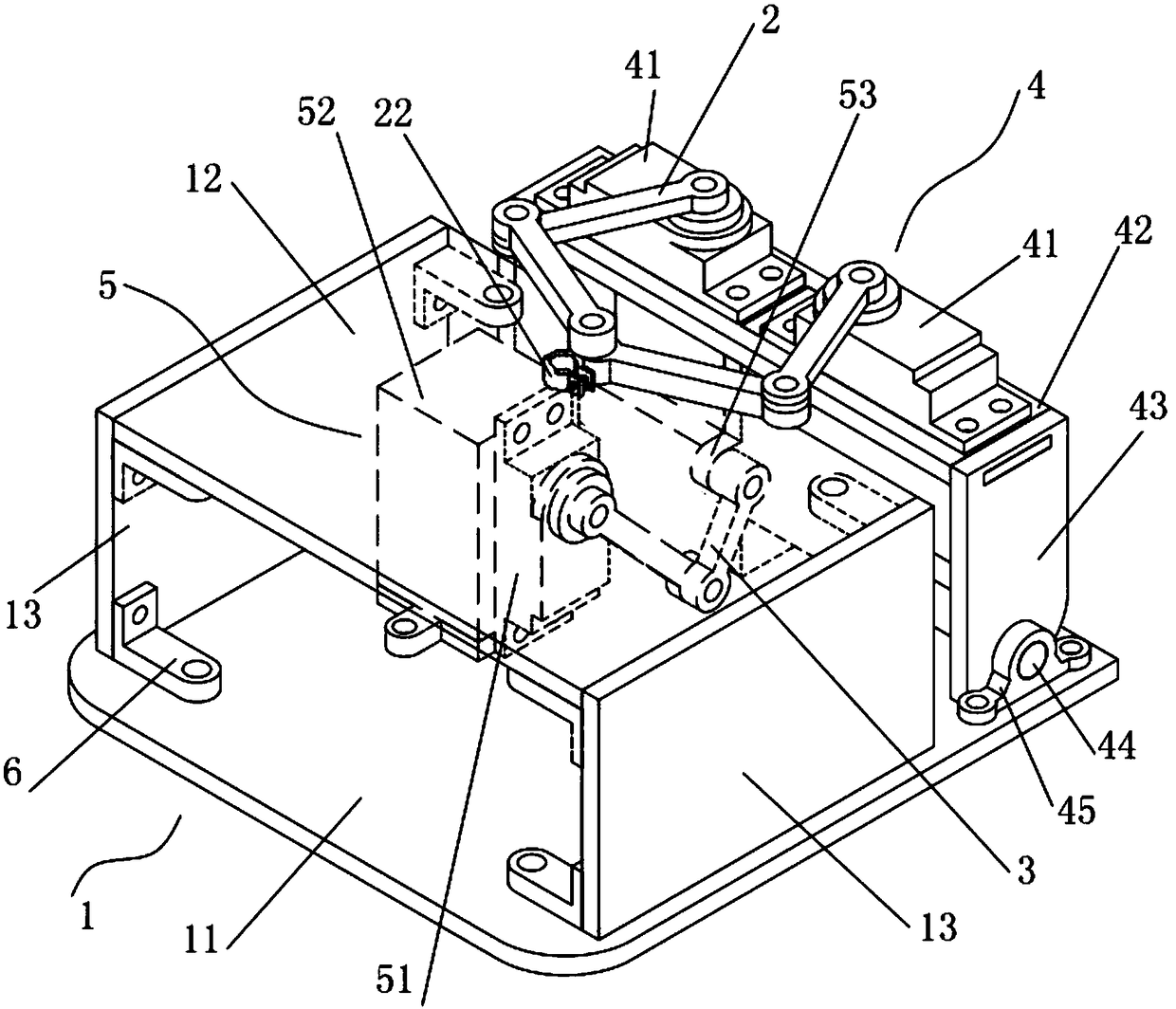
[0032] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0033] Such as figure 1 Shown, a kind of drawing robot comprises the support device 1 that is used to support each mechanism and places drawing paper, and described support device 1 comprises base plate 11, top plate 12 and side plate 13, and described side plate 13 is connected with base plate 11 and top plate respectively 12 is fixedly connected, and supports the top plate 12, and the top plate 12 is used for placing drawing paper. The bottom plate 11 is the positioning basis for the installation of the entire structure, not only supporting the entire mechanical structure, but also establishing the foundation between the equipment and the working surface, and between the equipment and the equipment. In this embodiment, the top plate 12, the bottom plate 11 and the side plate 13 A plurality of foot frames 6 for reinforcement are arranged betw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More