Bionic foot with variable stiffness toe and heel joints
A toe and heel technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of inability to increase, low energy efficiency, and inability to change the rigidity of toe joints, and achieve the effect of not being easily plastically deformed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] A specific embodiment of the present invention will be described below in conjunction with the accompanying drawings.
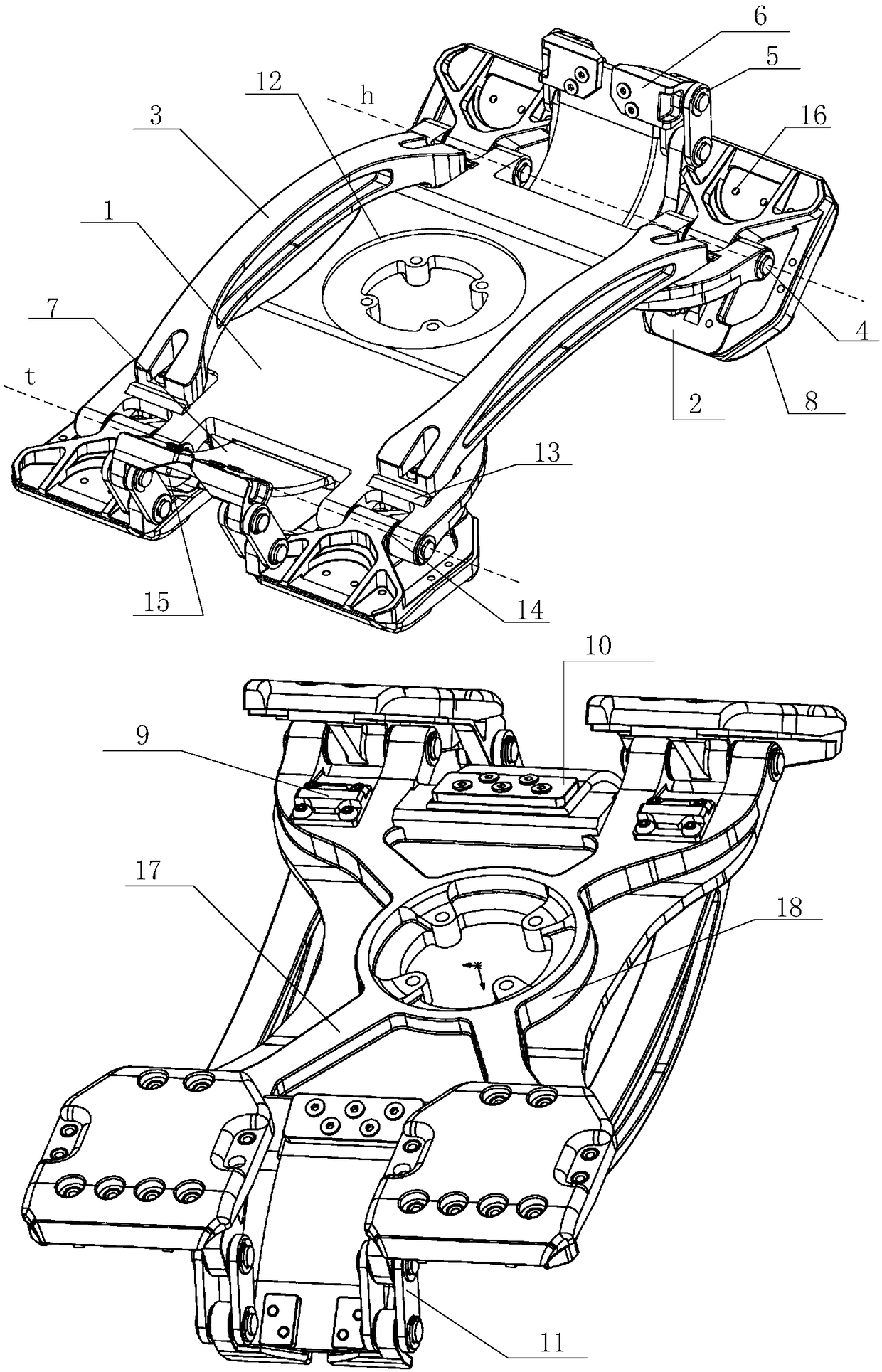
[0032] Such as figure 1 As shown, the bionic foot according to the present invention includes the following specific structures.
[0033] The structural body of the bionic foot mainly includes three parts: sole 1, toe, and heel 3. The function of the bionic foot of the present invention mainly includes five parts: reinforcing ribs and weight-reducing features, hinges, elastic bodies, cushioning materials, and sensor connection features.
[0034] The sole of the foot 1 is designed in an upwardly convex arc, imitating the arch of a human foot, thereby reducing weight and improving strength. The installation position of the force sensor is 109mm and 85mm from the hinge at the junction of the toe, heel and sole of the foot, respectively, and the lateral distance from the edges on both sides is 81mm and 65mm respectively.
[0035] In a preferred embodime...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com