

A 3-D line-of-sight estimation method based on iris projection matching function
A technology of projection matching and line of sight estimation, which is applied in the field of line of sight tracking, can solve the problem of less calibration points, etc., achieve the effect of less calculation, high accuracy, and improve the overall accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments. It should be pointed out that the described embodiments are only a part of the embodiments of the present invention, rather than all embodiments. Based on the embodiments of the present invention, all those skilled in the art can obtain without creative work. Other embodiments all belong to the protection scope of the present invention.
[0040] Such as figure 1 As shown, the hardware configuration of the present invention requires an ordinary camera, which is located directly above the center of the screen, and captures the RGB image and the depth image of the face in real time.
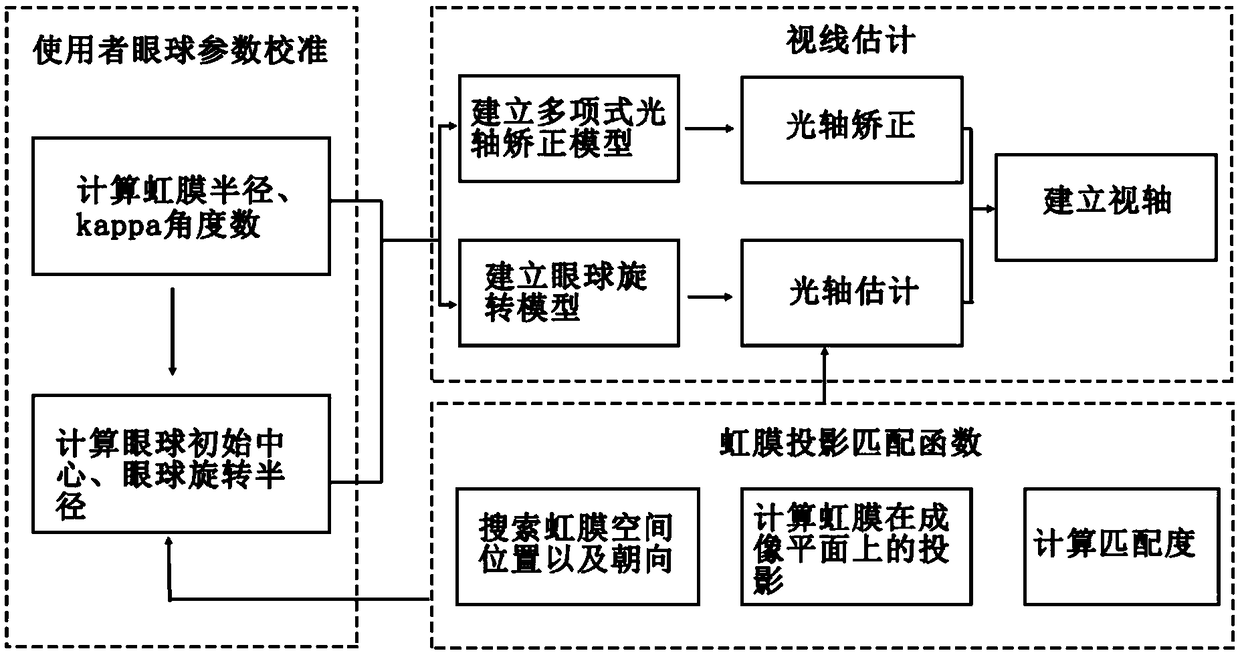
[0041] Such as figure 2 Shown, the specific implementation steps of the present invention are as follows:
[0042] Step 1: Eyeball model user parameter calibration;
[0043] Step 2: Calibrate the rotation radius of the eyeball model ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More