

Hybrid derivative-free expansion Kalman filter-based ultra short base line/ strapdown inertial navigation system (USBL/SINS) tight combined navigation positioning method
A technology of extended Kalman, navigation and positioning, applied in the field of positioning of underwater equipment, can solve problems such as difficult to use real-time integrated navigation system, unscented Kalman filter, large amount of calculation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0101] The present invention will be described in further detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the embodiments.
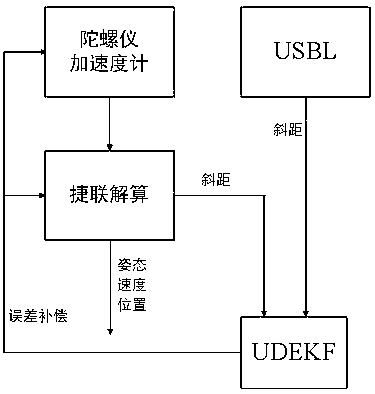
[0102] Such as figure 1 As shown, the present invention is composed of an ultra-short baseline underwater acoustic positioning system USBL and a strapdown inertial navigation system SINS, and uses a hybrid derivative-free extended Kalman filter HDEKF for combined navigation. The specific implementation steps are as follows:
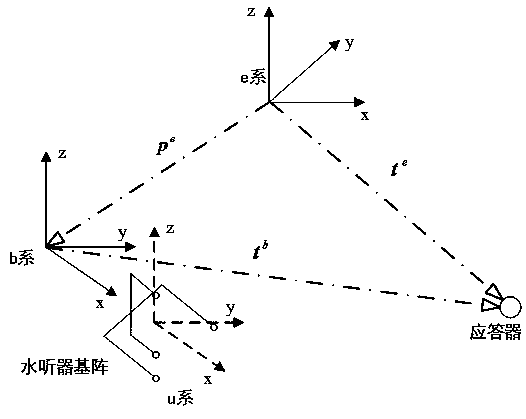
[0103] Step 1: The ultra-short baseline system consists of a hydrophone array installed on the carrier and a transponder placed at a known position on the seabed. The hydrophone array is composed of 4 hydrophones, and the ultrasonic signal is measured from The round-trip travel time t from the sound source to the transponder, and from the transponder back to the i-th hydrophone RTTi ,Expressed as:
[0104]
[0105] t p is the real time from the sou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More