

Soft finger rehabilitation robot system used for symmetric rehabilitation
A rehabilitation robot and software technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of electrical safety risk, reduced precision, complex structure and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
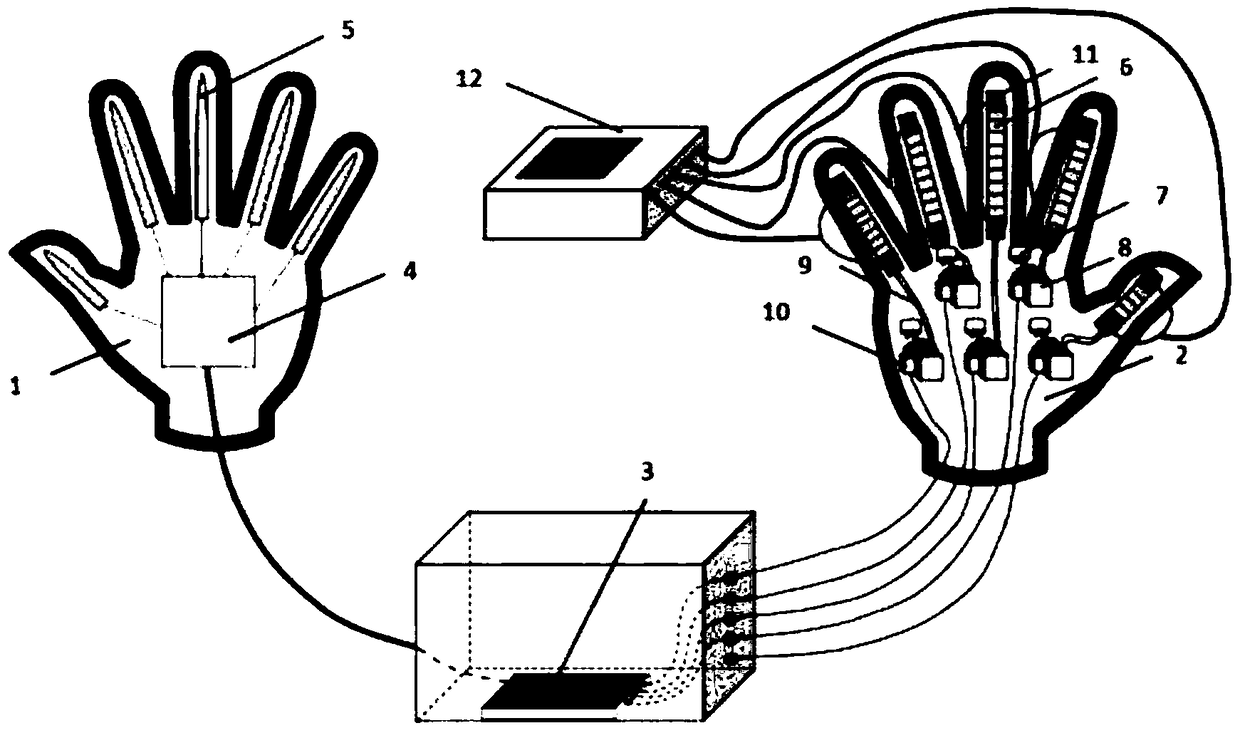
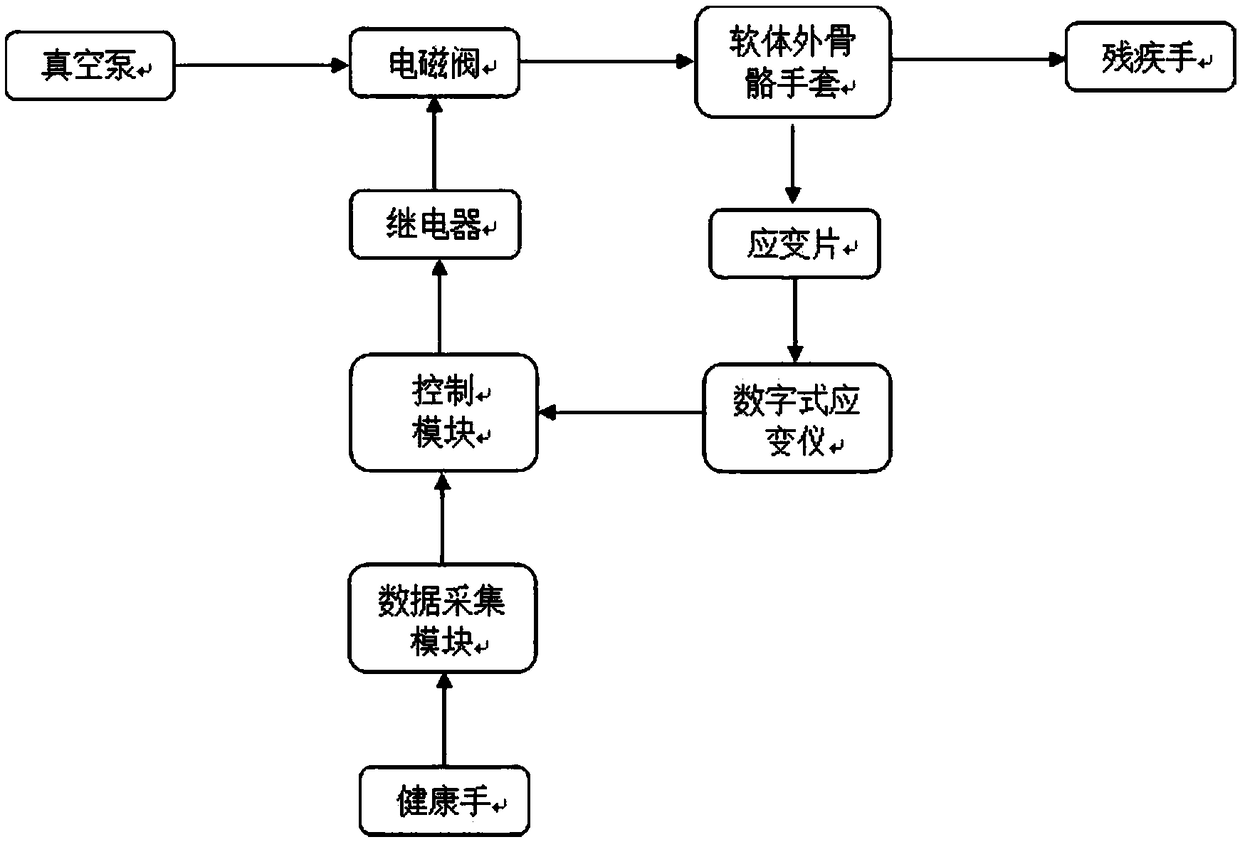
[0019] A finger software rehabilitation robot system for symmetrical rehabilitation, comprising a soft exoskeleton glove 2, a control module 3, a data acquisition module 4, a drive module, a monitoring module and a software actuator 6; wherein, one end of the control module 3 is connected to the The data acquisition module 4, the other end is connected to the drive module; the monitoring module is connected to the drive module; it also includes a data acquisition glove 1, a flexible angle sensor 5, wherein the flexible angle sensor 5 is arranged along the finger direction of the glove body On the finger part of the glove body; the drive module is realized by a vacuum pump 7; it also includes a solenoid valve 8 and a PVC pipe 9, and one of the two vents of the vacuum pump 7 is directly exposed to the air and communicated with the atmospheric env...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More