

An ophthalmic robot end device for vitreous-retinal surgery
A retinal and robotic technology, applied in surgical manipulators, surgery, ophthalmic surgery, etc., can solve the problem that the change of torque cannot be detected, and achieve the effect of compact structure design and light overall weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the accompanying drawings.
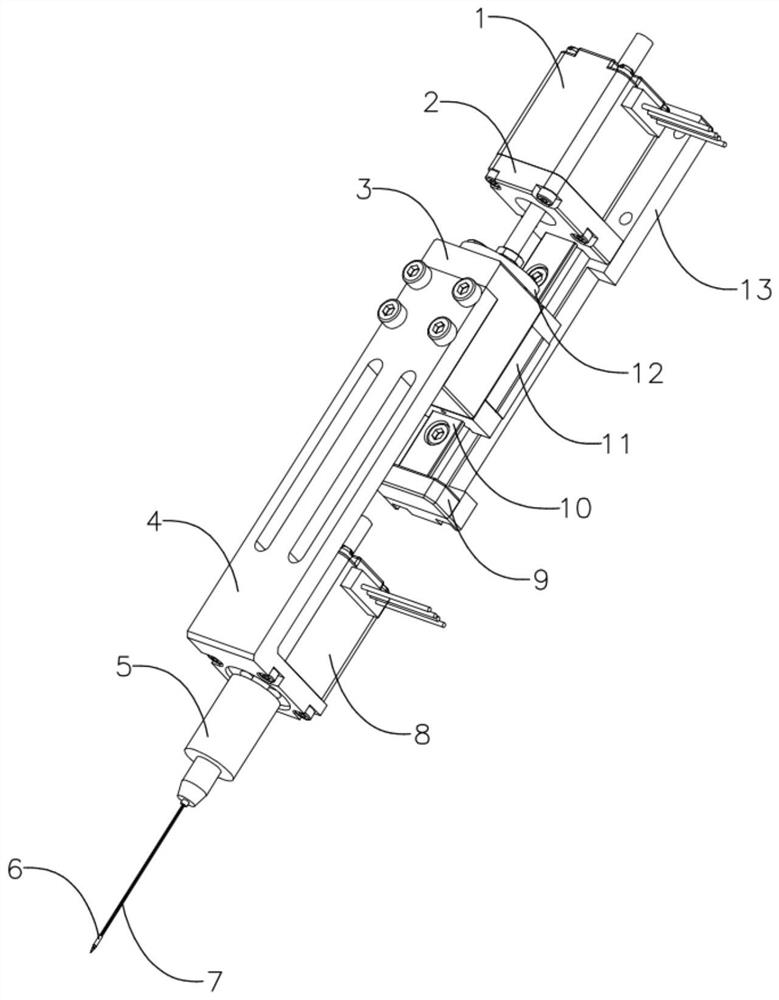
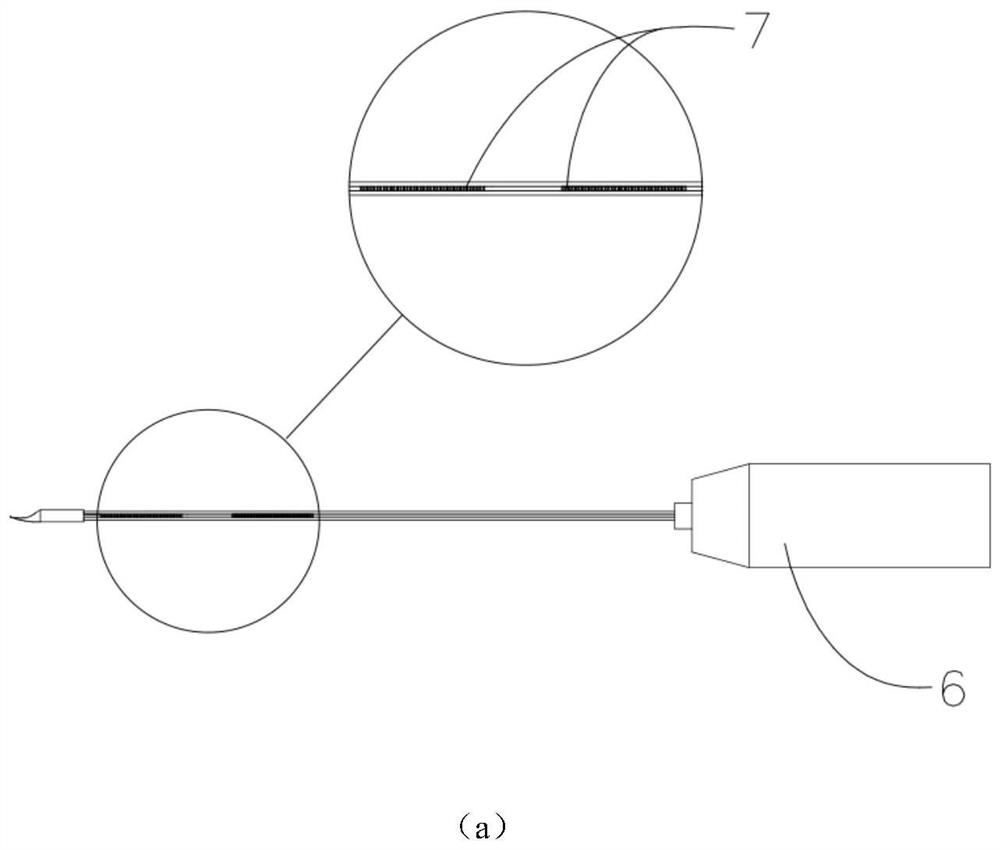
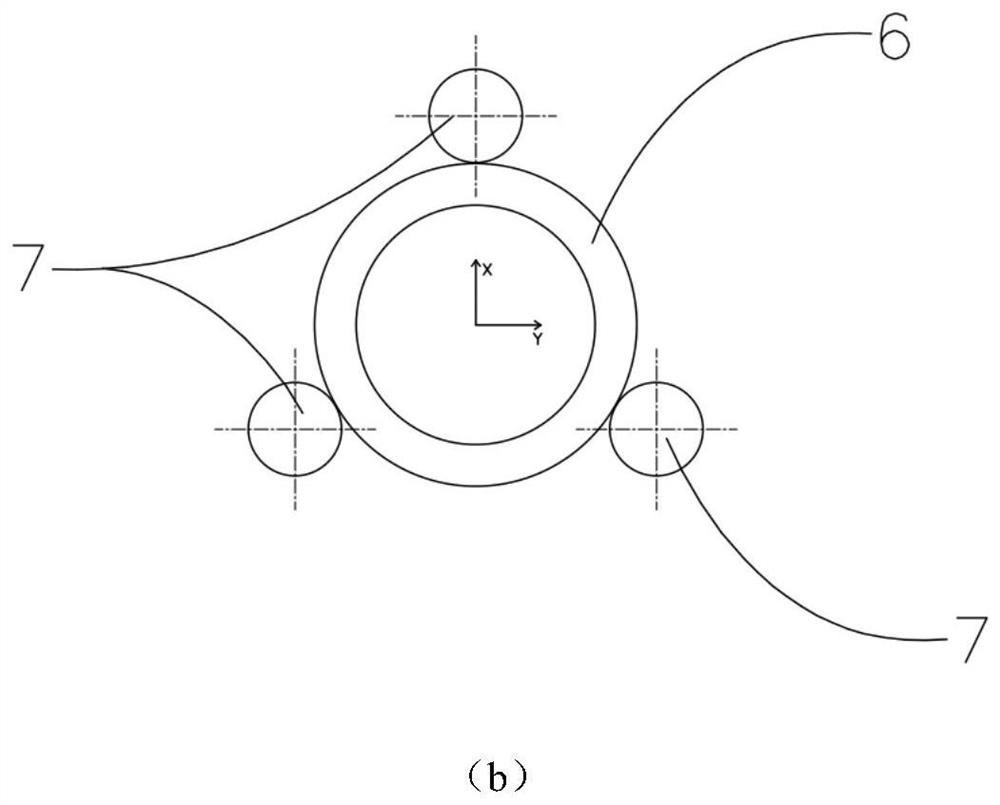
[0022] An ophthalmic robot end effector for vitreous-retinal surgery, figure 1 It is a schematic diagram of the overall structure of the present invention, including: stepper motor I (1), motor mount I (2), connection block (3), motor mount II (4), coupling (5), microsurgery Hook (6), fiber grating sensor (7), stepper motor II (8), baffle plate (9), slide rail (10), slider (11), lead screw nut (12), slide rail connection seat ( 13).
[0023] Depend on figure 1 As shown, the end effector has two degrees of freedom, which are linear motion along the axial direction and rotational motion around the axial direction.
[0024] Depend on figure 1 As shown, the linear motion part is composed of a stepper motor I (1), a slide rail (10) and a slider (11). The slider (11) is connected with the motor mounting base II (4) through the connecting block (3), thereby controlling...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More