

Sea wave travelling parameter detecting method and attitude self-adjustment unmanned ship
An unmanned ship and ocean wave technology, applied in attitude control, measuring the movement of open water sources, measuring devices, etc., can solve the problems of large delay, low accuracy, slow response and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
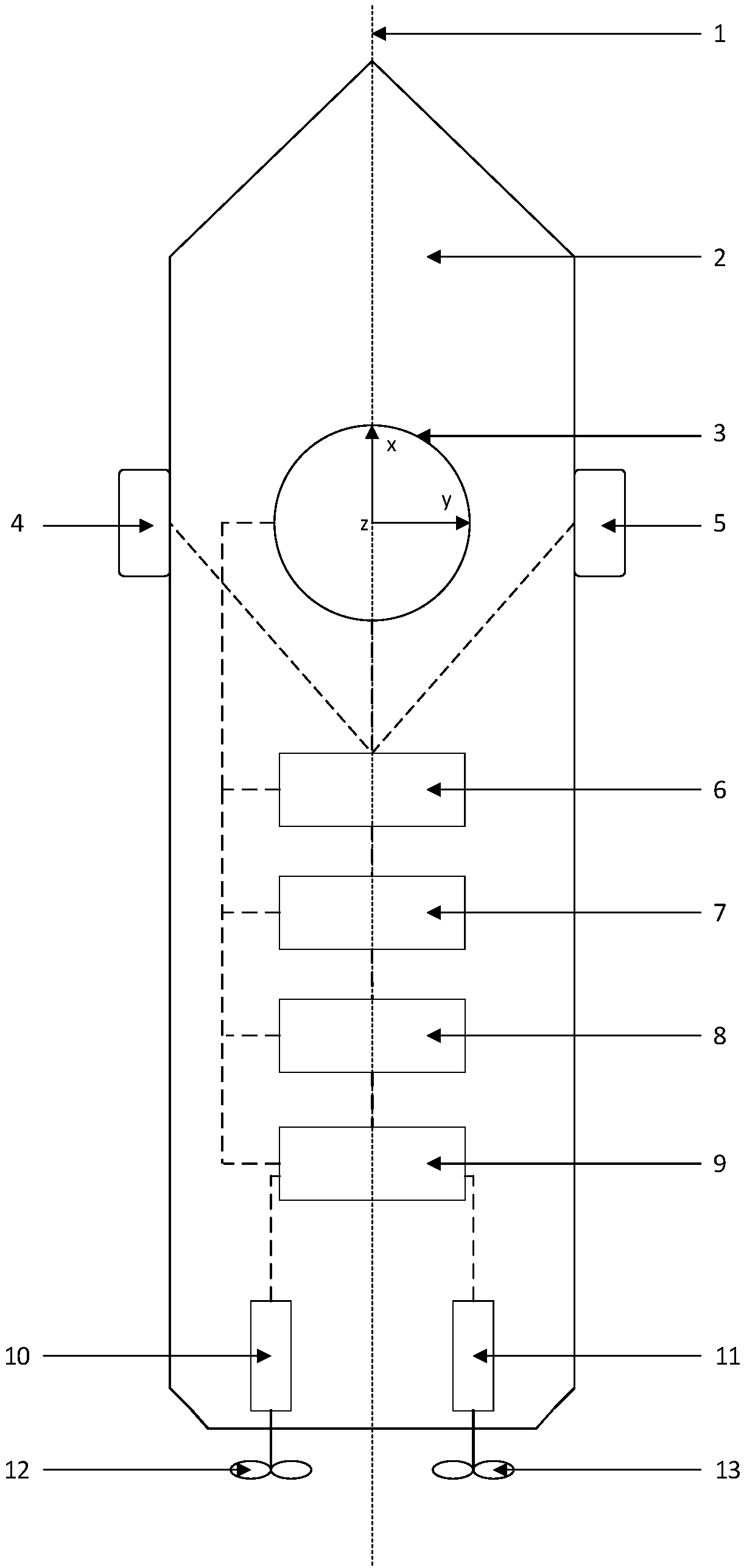
[0039] A method for detecting wave traveling wave parameters and an unmanned ship with self-adjusting attitude, such as figure 1 shown. The unmanned ship floats on the sea. Through the remote control of the navigation communication system 7 or the automatic navigation mode, the control system 9 controls the speed of the left motor 10 and the right motor 11 to drive the left water wheel 12 and the right water wheel 13 to rotate accordingly. Drive to destination to start work. The hull 2 tilts randomly following the wave fluctuations. The left distance sensor 4 and the right distance sensor 5 respectively measure the height change of the uppermost outer wall of the left side and the right side of the hull 2 from the sea surface. The multi-axis sensor 3 measures the acceleration change and the magnetic field change of the ship. The collected information is transmitted to the signal acquisition system 6. After filtering and data analysis, the signal acquisition system 6 calcu...
Embodiment 2
[0043] A method for detecting wave traveling wave parameters and an unmanned ship with self-adjusting attitude, such as figure 1 shown. When the unmanned boat is used in deep-sea culture cage feeding, it is necessary to make the bow of the boat face the center of the cage. Ocean waves are reflected on the edge of a large net cage. A method for detecting the parameters of ocean waves and an unmanned ship with self-adjusting attitude are affected by the waves reflected by the net cage. After passing through the multi-axis sensor 3, the left distance sensor 4, the right distance sensor 5 and The information collection system 6 calculates the included angle α (α is greater than 0 and less than π) of the hull 2 relative to the direction of the reflected ocean wave. The control system 9 controls the hull 2 to rotate until the bow of the unmanned ship faces the center of the cage, then keeps the hull still relative to the cage, and starts feeding operations.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More