

Integrated navigation method based on fault-tolerant Kalman filtering
A Kalman filter and Kalman filter technology, applied in the field of integrated navigation, can solve problems such as fault tolerance performance to be improved, weak anti-interference ability, etc., and achieve the effect of improving the utilization degree and improving the robust performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
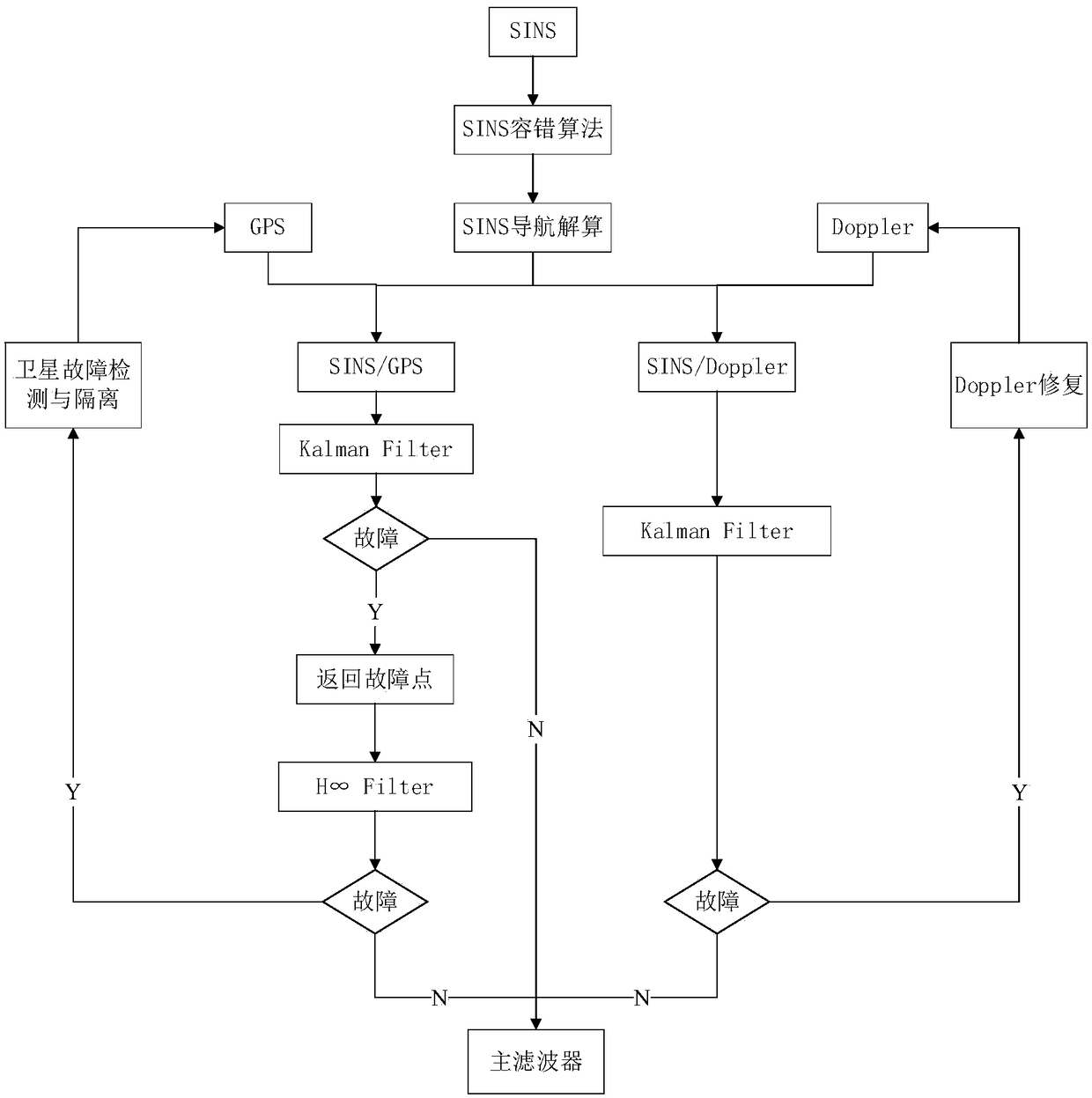
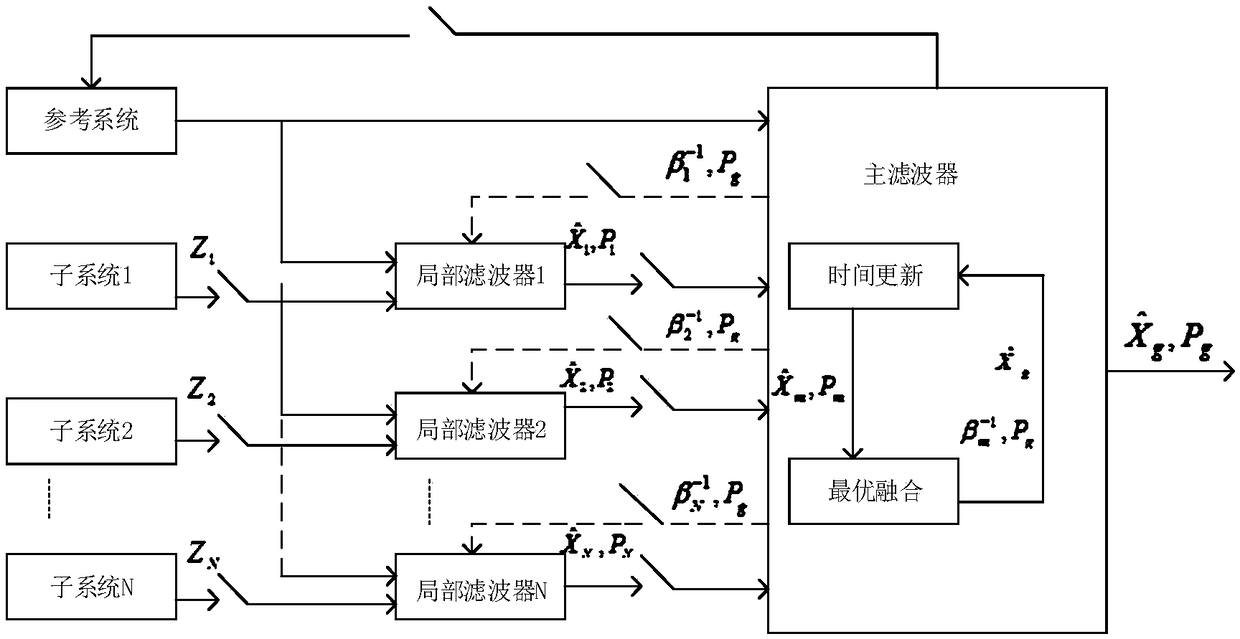
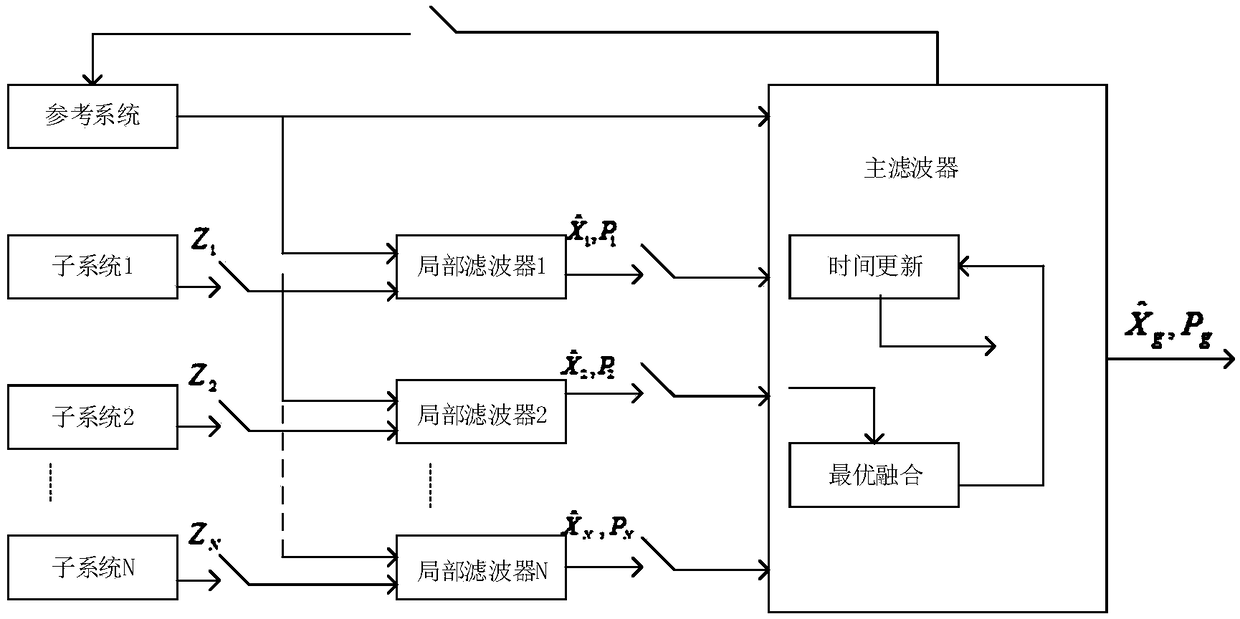
[0061] The purpose of the present invention is to provide an integrated navigation method based on fault-tolerant Kalman filtering. It is aimed at SINS / GPS / Doppler multi-combined navigation system, the structure diagram of the system is as follows figure 1 shown. in figure 2 for the federated Kalman filter structure with reset and image 3 is a federated Kalman filter structure without reset. The present invention optimizes the design on the non-reset federated Kalman filter structure, and adds a fault-tolerant Kalman filter and a fault detection function to one of the sub-filters.
[0062] The technical scheme adopted in the present invention comprises the following steps:
[0063] Step 1. Select as a state variable,
[0064] in: δλ: inertial navigation system latitude and longitude error;
[0065] δV x ,δV y : The speed error of the inertial navigation system in the east and north directions of the geographical coordinate system;
[0066] ε x ε y ε z : gyros...
specific Embodiment 2
[0116] The purpose of the present invention is to provide an integrated navigation method based on fault-tolerant Kalman filtering. Aiming at SINS / GPS / Doppler multi-combined navigation system, the technical scheme adopted in the present invention comprises the following steps:
[0117] Step 1. Select as a state variable,
[0118] in: δλ: inertial navigation system latitude and longitude error;
[0119] δV x ,δV y : The speed error of the inertial navigation system in the east and north directions of the geographical coordinate system;
[0120] ε x ε y ε z : gyroscope first-order Markov process random error;
[0121] αβλ: The platform error angle of the strapdown inertial navigation in the geographic coordinate system to the east, north, and sky;
[0122] Then according to the system characteristics, write out the state equation of the system:
[0123] The SINS / GPS subsystem selects position and velocity as quantities to measure,
[0124] which is
[0125] In...
specific Embodiment 3
[0164] The invention discloses an integrated navigation method based on fault-tolerant Kalman filtering. This method is aimed at the inertial / satellite / Doppler integrated navigation system, which consists of two sub-filters and a main filter. The present invention carries out fault-tolerant design on the inertial / satellite navigation subsystem, and adds a fault-tolerant Kalman filter to improve its anti-interference ability. When the system state model and prior information are known, the conventional Kalman filter is preferred for state estimation, and then a fault detection is performed. If there is no fault, it is directly sent to the main filter for data fusion; if a fault occurs, Then use the fault-tolerant Kalman filter to replace the sub-filter, and return to the fault point to re-evaluate the state. The output data is subjected to fault detection again, and if there is no fault, it is sent to the main filter for data fusion. When there is a fault, the subsystem is di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More