Spatial non-cooperative target laser-point cloud ICP pose matching correctness judging method and system
A non-cooperative target and laser point cloud technology, which is applied in the field of correctness judgment of laser point cloud ICP pose matching of non-cooperative targets in space, to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] A detailed description will be given below in conjunction with the accompanying drawings and specific embodiments.
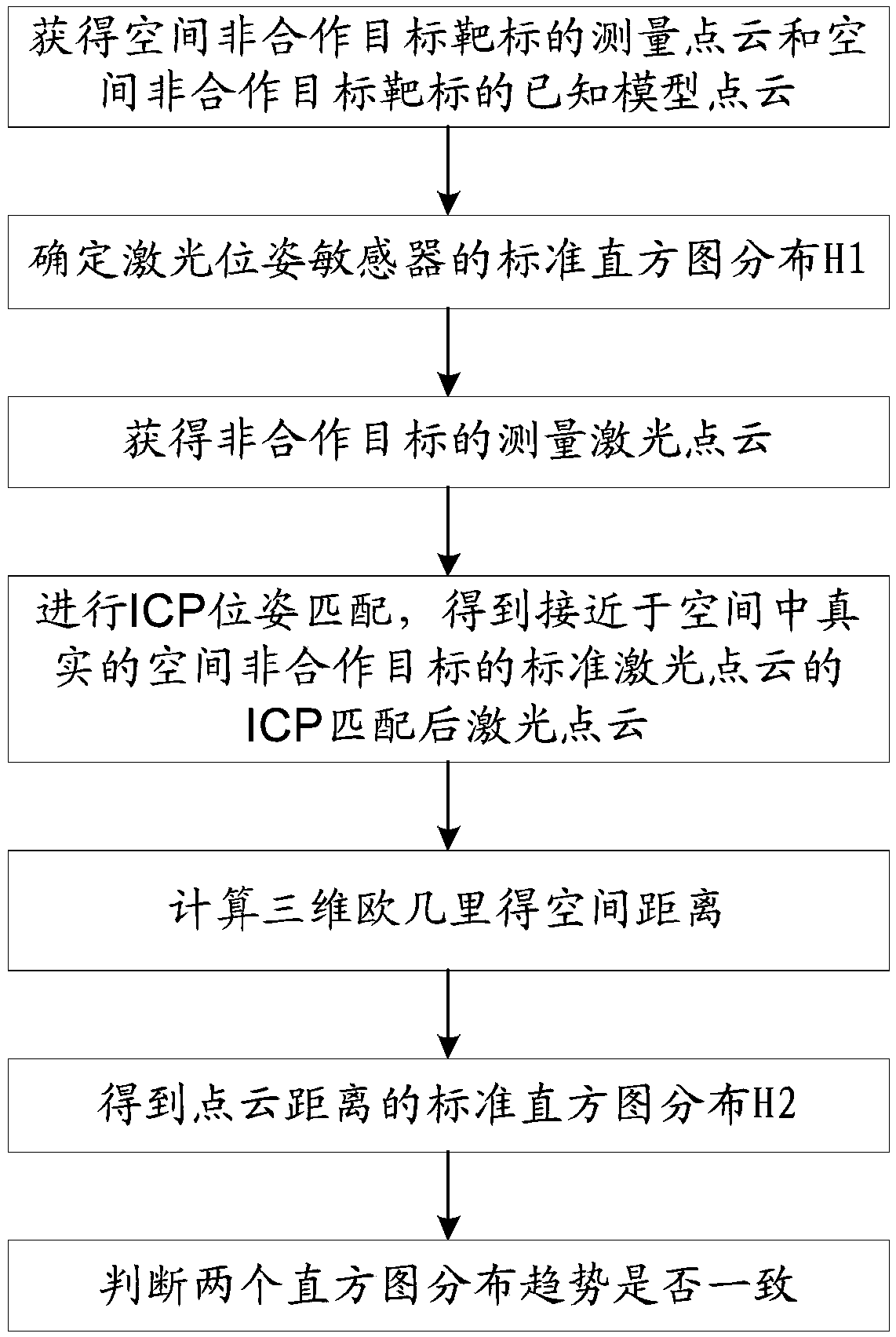
[0053] The invention discloses a method for judging correctness of laser point cloud ICP pose matching of a space non-cooperative target, which carries out a ground physical simulation test to obtain a measurement point cloud of a space non-cooperative target target and a known model point cloud of a space non-cooperative target target; ICP pose matching, to obtain the laser point cloud after ICP matching of the standard laser point cloud close to the real space non-cooperative target in space; get the standard laser point cloud of the laser point cloud after ICP matching and the real space non-cooperative target in space Above, the three-dimensional Euclidean space distance of each group of corresponding points; perform histogram distribution statistics to obtain the standard histogram distribution H2 of the point cloud distance; judge whether the distrib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



