Urban terrain three-dimensional reconstruction method based on four-rotor unmanned aerial vehicle laser radar system
A four-rotor UAV and three-dimensional reconstruction technology, which is applied in radio wave measurement system, satellite radio beacon positioning system, electromagnetic wave reradiation, etc., can solve the problem of low automatic modeling ratio, low efficiency, model voids and distortions, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
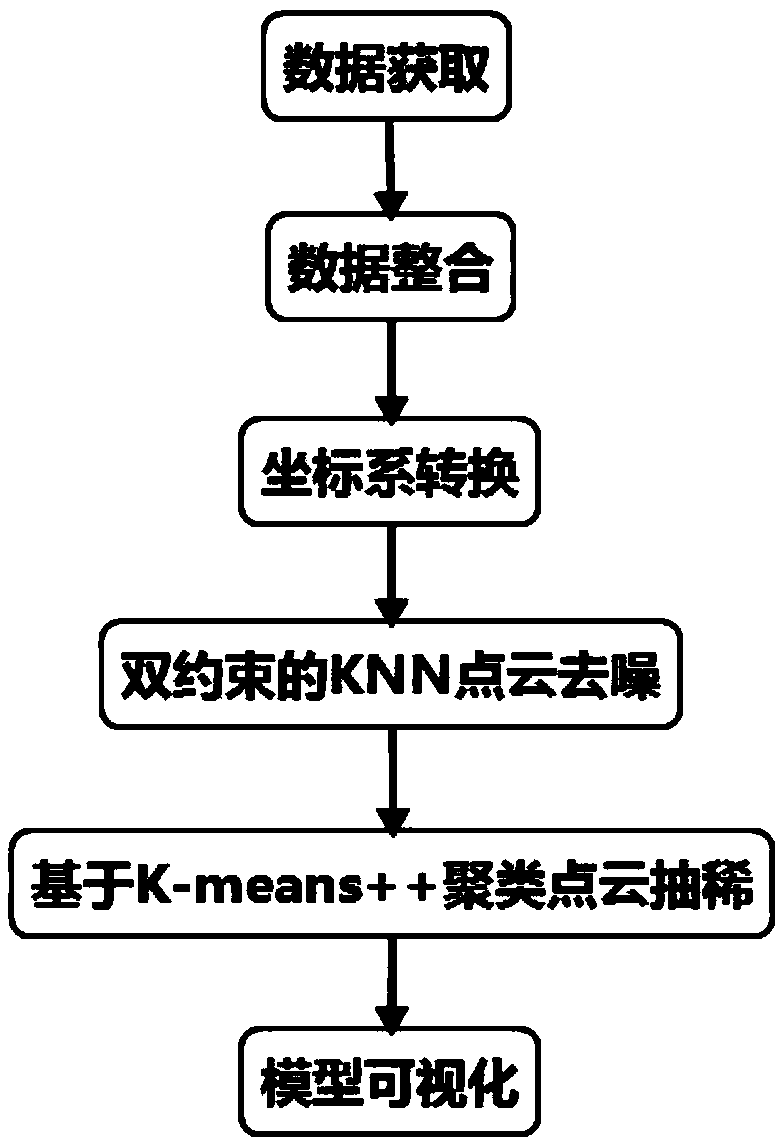
[0052] In this example, if figure 1 As shown, a 3D reconstruction method of urban terrain based on the quadrotor UAV lidar system is carried out as follows:
[0053] Step 1. Data acquisition:
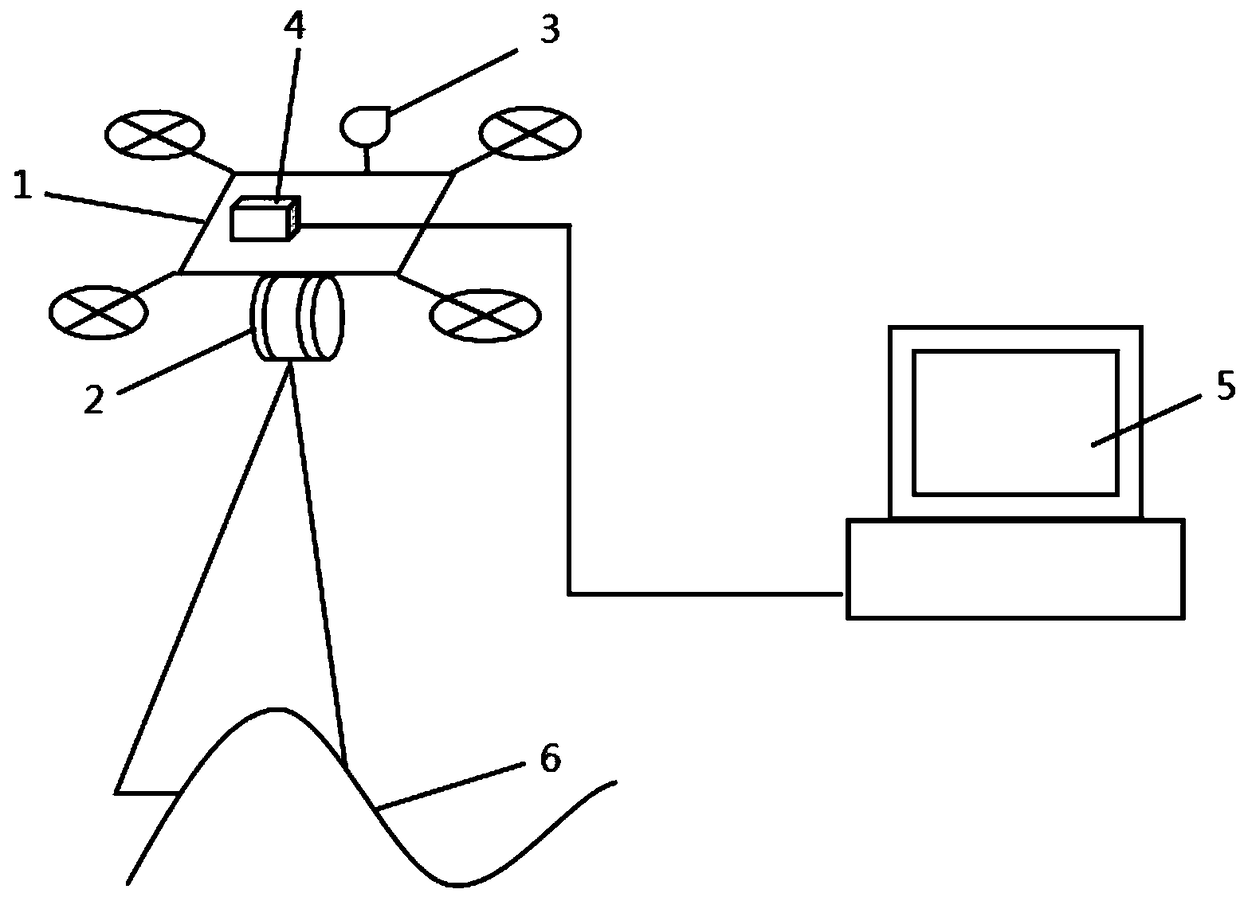
[0054] Step 1.1. Use the airborne GPS on the quadrotor UAV to obtain its own positioning information set in RMC format in real time and send it to the ground base station frame by frame in order for storage. Any αth positioning information includes: αth GPS time stamp RMC α .timestamp, αth longitude and latitude RMC α .position, the αth heading information RMC α .track;
[0055] Step 1.2. Use the airborne lidar on the quadrotor UAV to obtain the urban terrain data set D and send it to the ground base station frame by frame in order for storage. Any jth urban terrain data d j Contains: the jth dot d j .PointID, the jth space coordinate point (x j ,y j ,z j ), the jth adjustment time d j .adjustedtime, the jth azimuth d j .Azimuth, jth distance d j .Distance, the jth reflectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



