Unmanned aerial vehicle robust tracking method for maneuvering target
A maneuvering target, machine robust technology, applied in the field of robust maneuvering target tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0056] The present invention will be described in further detail with regard to specific implementation below, and the overall flow of the method can refer to figure 1 .
[0057] Step 1: Establishing the student's t-distribution jump Markov model when the UAV performs single maneuvering target tracking;
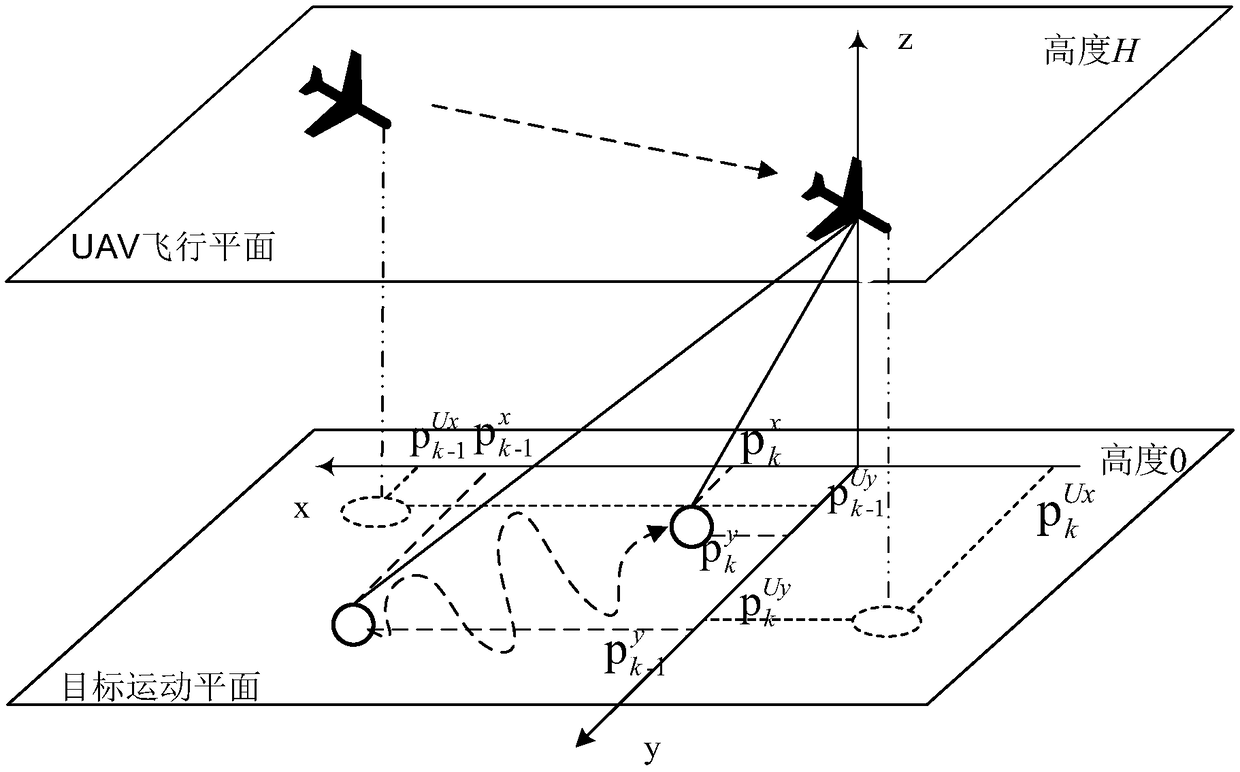
[0058] figure 2 Described the working scene setting of an embodiment of the present invention, the setting of concrete parameter and the hypothesis of scene are not limited to the setting described in this figure, this figure has shown UAV and moving target at two adjacent sampling moments (k-1 and the spatial position information at time k). As shown in the figure, a UAV flies in a three-dimensional space with an x-y-z coordinate system and tracks a moving target. The tracked target is a ground target. It can be considered that its vertical height does not change and its height is 0, that is, the target is only Moving on the x-y plane, at this time the UAV can also maint...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More