

Intelligent weeding robot system and control method based on depth vision
A technology of deep vision and robotics, applied in the field of intelligent robots, can solve the problems of high hazards in the use of chemical pesticides, inability to adjust the mechanical arm, and affect the accuracy of weeding, so as to ensure the efficiency and accuracy of weeding, improve the accuracy of identification and positioning, and improve efficiency and the effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
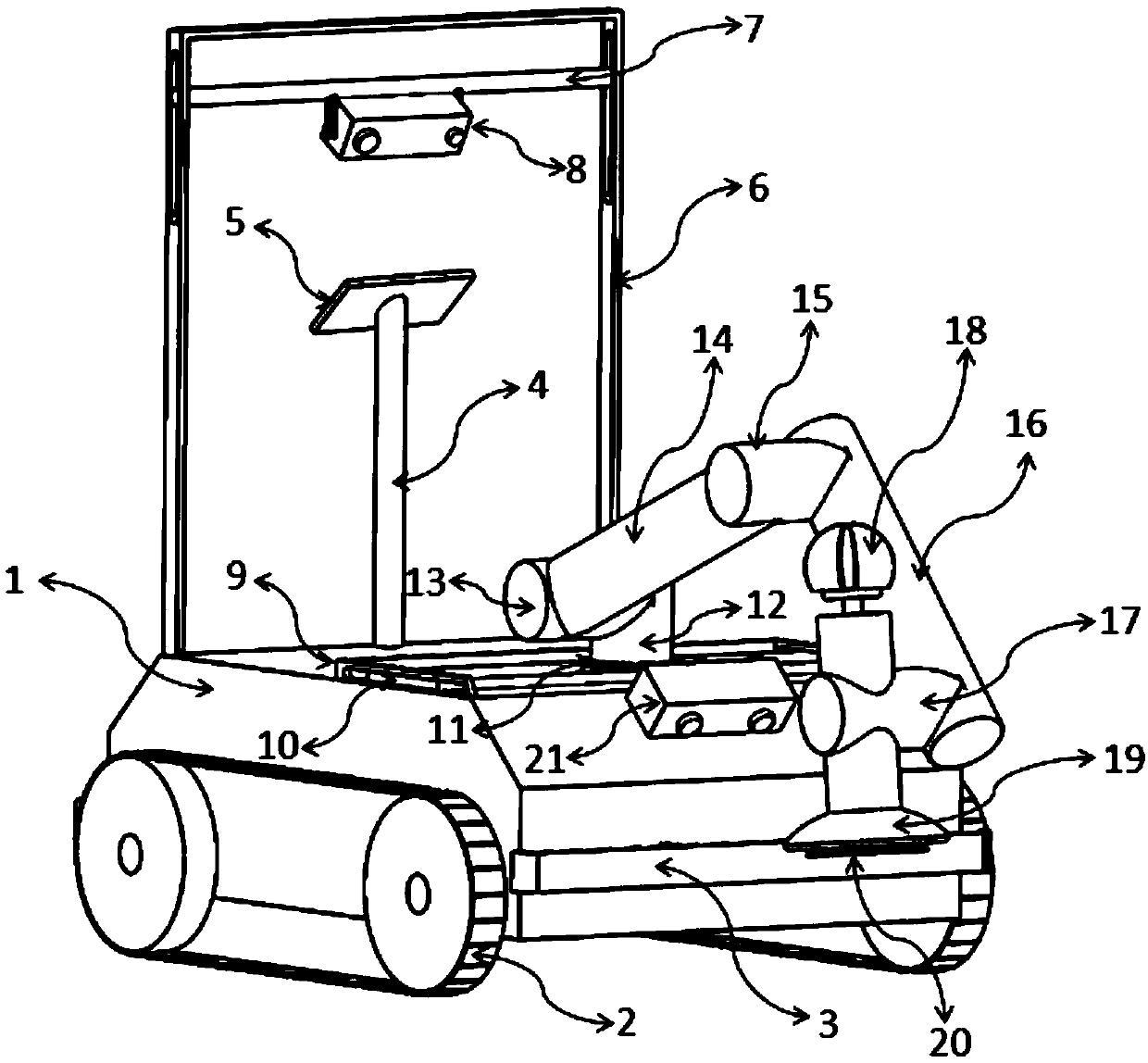
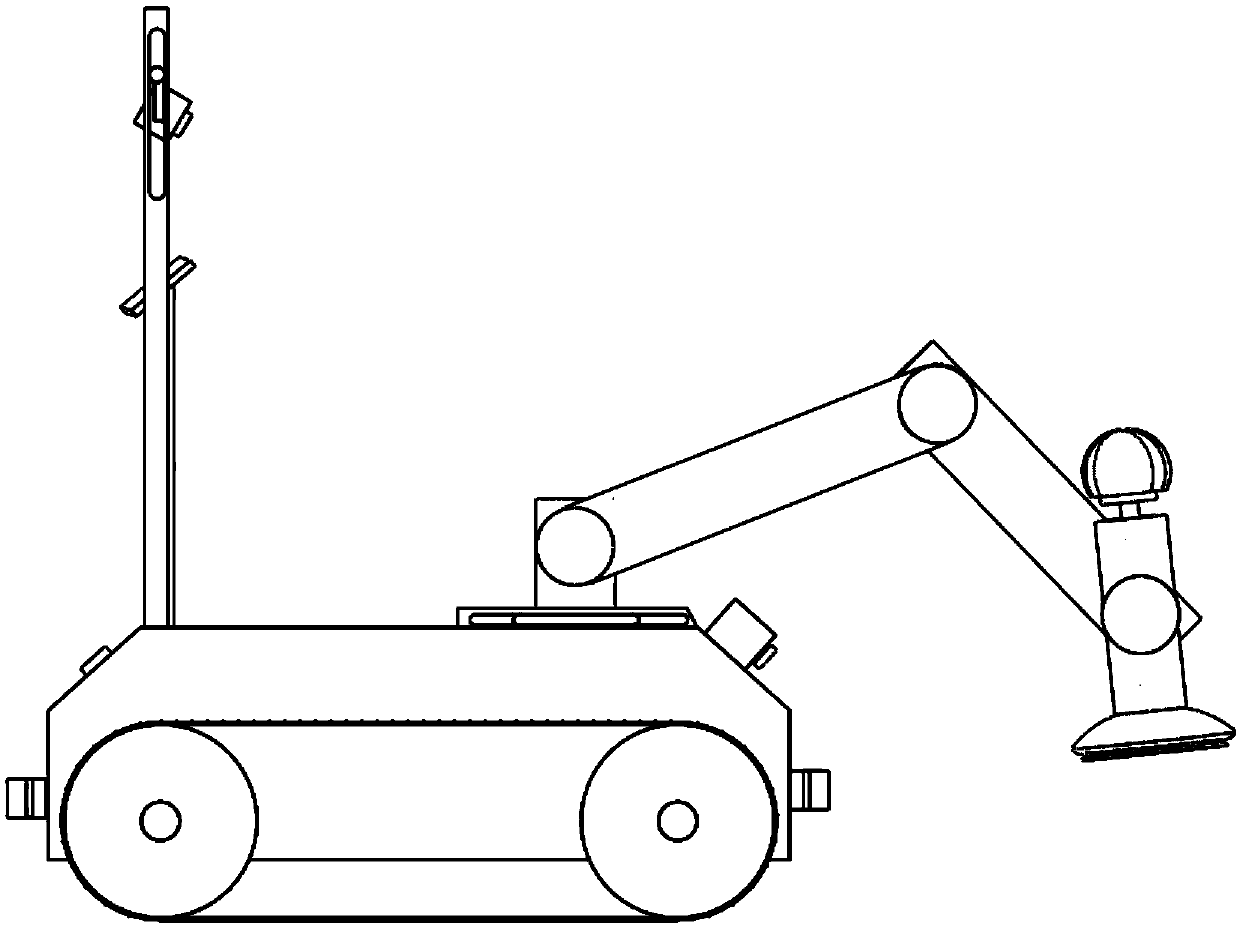
[0041] see Figure 1-9 In the embodiment of the present invention, an intelligent weeding robot based on depth vision includes an industrial computer, a power module, a trolley body 1, a crawler wheel 2, hydraulic claws 18 and a weeding device 20, and the trolley body 1 is equipped with a The crawler driving wheel 2 driven by the driving wheel driving device, the crawler driving wheel 2 is composed of two synchronous driving wheels meshing with the crawler belt, and the two synchronous driving wheels are respectively connected to the output shaft of the corresponding driving wheel driving device, and the crawler driving wheel 2 Symmetrically installed on both sides of the trolley main body 1, 50mm away from the bottom plane of the trolley main body 1, the crawler driving wheels 2 realize the normal running of the trolley main body 1 through synchronous driving, and the front and back of the crawler driving wheels on both sides of the trolley main body 1 Turn around to realize ...
Embodiment 2
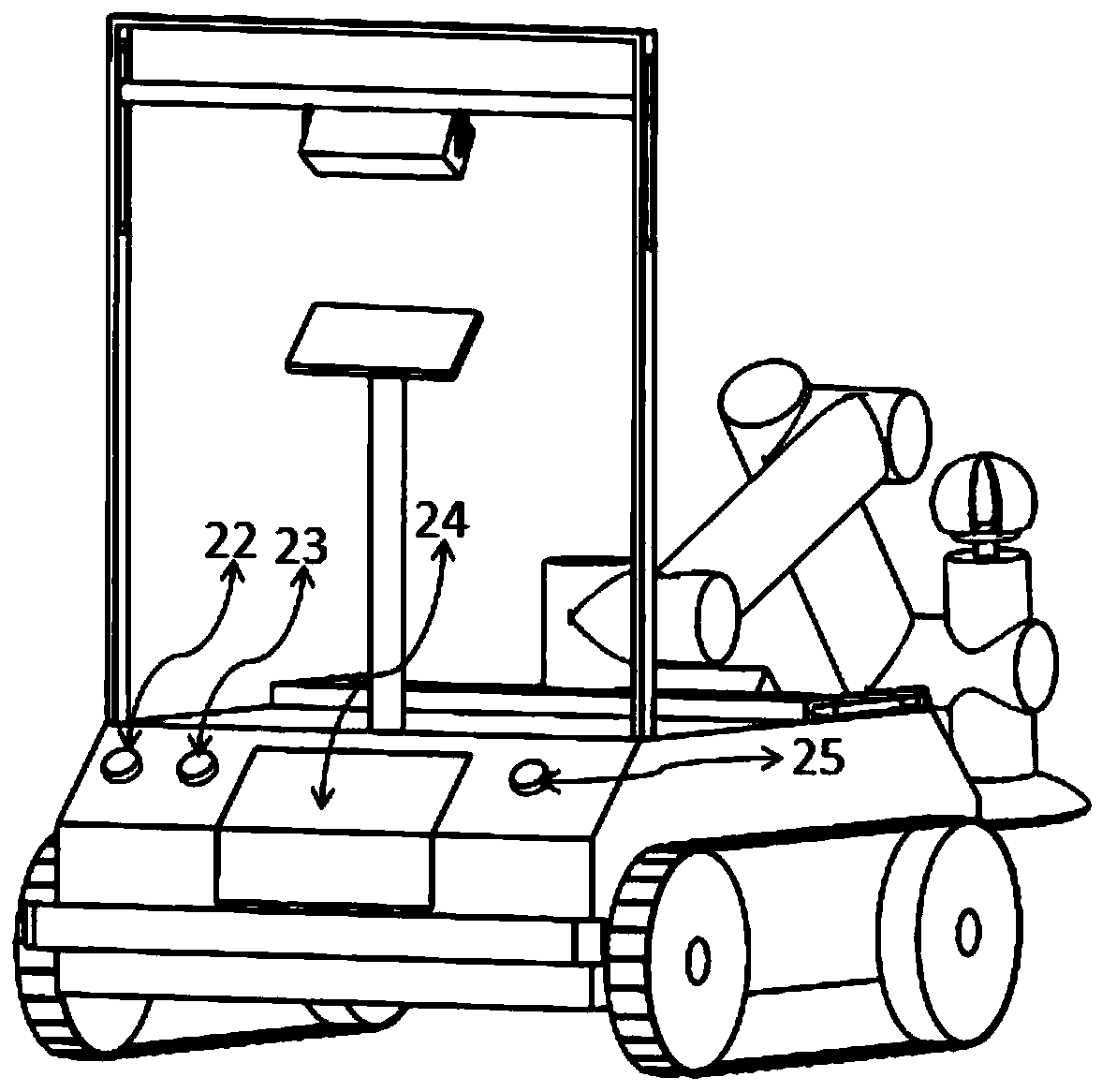
[0044] see Figure 1-9 , in the embodiment of the present invention, an intelligent weeding robot based on depth vision, on the basis of the above embodiment: in this embodiment, the power module is preferably a 48V rechargeable power supply, and the rechargeable power supply is installed on the car body 1. In the groove, and the groove is fixed with a power supply cover 24, which encapsulates the rechargeable power supply. Of course, the main body 1 of the car is provided with a charging interface 25 corresponding to the rechargeable power supply.
[0045] In this embodiment, the length, width and height of the trolley main body 1 are 1000 mm, 600 mm and 300 mm respectively. The trolley main body 1 is made of sheet metal material. 1 is provided with an emergency stop button 22 and a start button 23. Specifically, the arrangement positions of the emergency stop button 22, the start button 23 and the charging interface 25 are determined according to the use requirements, and ar...
Embodiment 3
[0048] see Figure 1-9 , in an embodiment of the present invention, an intelligent weeding robot based on depth vision, on the basis of the above embodiment: the depth camera module includes a first depth camera 8 and a second depth camera 21, wherein the first depth camera 8 is installed on the slidable adjustable support rod 7, and in order to realize the expansion of the viewfinder range, the first depth camera 8 can rotate relative to the slidable adjustable support rod 7, and the slidable adjustable support rod 7 is installed on the trolley through the camera support frame 6 On the main body 1, in fact, the two ends of the slidable adjustable support rod 7 cooperate with the notch provided on the side wall of the camera support frame 6 to realize the vertical position adjustment of the slidable adjustable support rod 7, the camera support The frame 6 is 600mm long, 30mm wide, and 800mm high. The material used is a 10mm thick aluminum alloy plate. The legs on both sides ne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More