

3D curve welding seam autonomous demonstration method for welding robot based on linear structure light perception
A welding robot and line structured light technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of low speed and low precision, improve effectiveness, meet safety, improve speed and The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0064] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0065] It should be pointed out that those skilled in the art can make some improvements and modifications without departing from the principle of the present invention, and these improvements and modifications should also be regarded as the protection scope of the present invention. All components that are not specified in this embodiment can be realized by existing technologies.
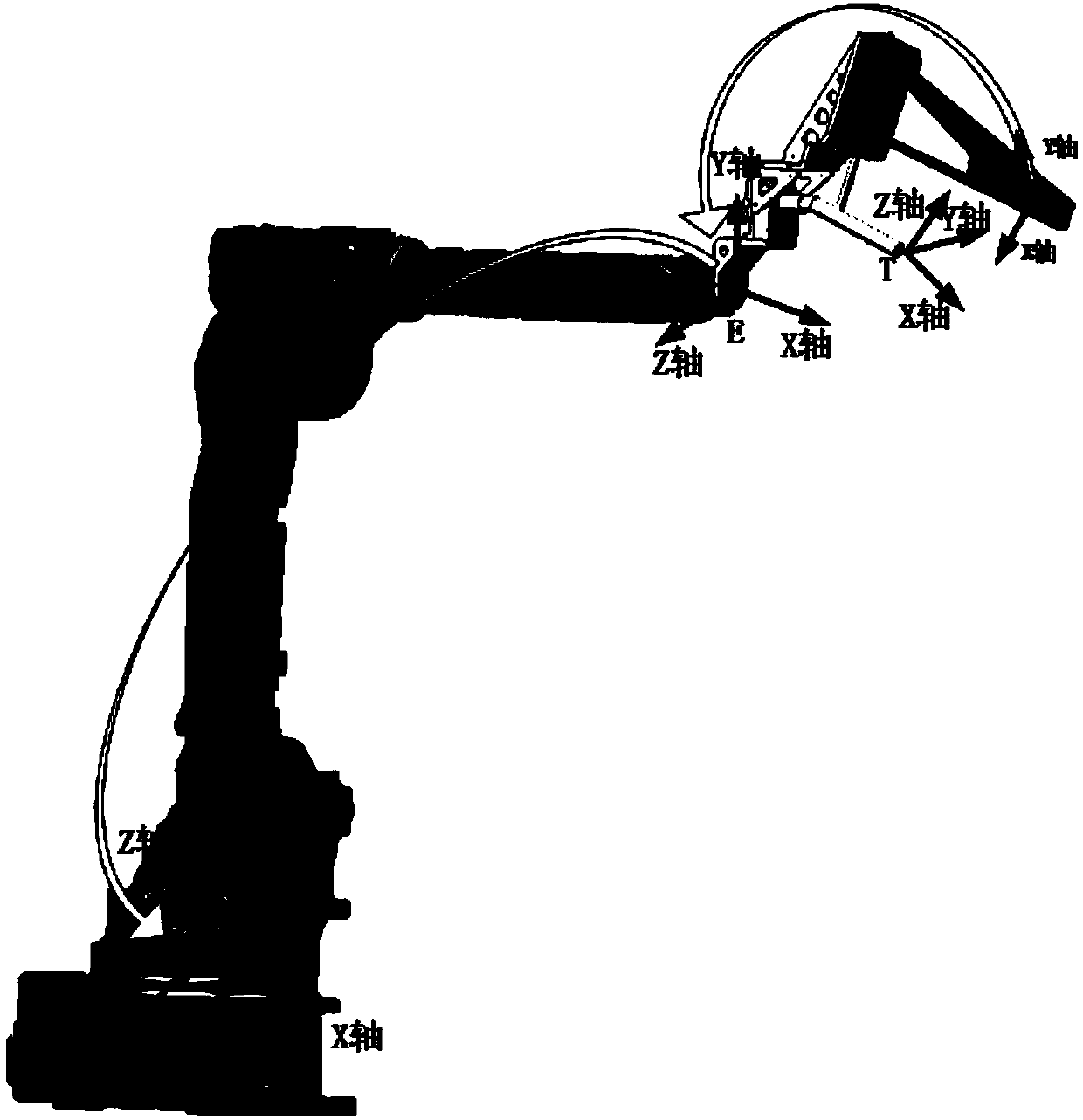
[0066] Such as figure 1 As shown, a method for autonomous teaching of a welding robot 3D curve weld seam based on line structured light perception of the present invention includes the following steps:
[0067] 1. Determine the scanning related parameters, and scan to generate an ordered point cloud model of the weldment
[0068] Among them, the relevant parameters include the starting pose of the scan, the scan distance, the scan direct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More