

Tunnel drilling robot and construction drilling method thereof
A technology of robots and drilling mechanisms, applied in drilling equipment and methods, drilling equipment, directional drilling, etc., can solve the problems of high scrap rate of drill bits, complex equipment, low drilling efficiency, etc., to reduce the probability of rebar, reduce Dust concentration, simple structure effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
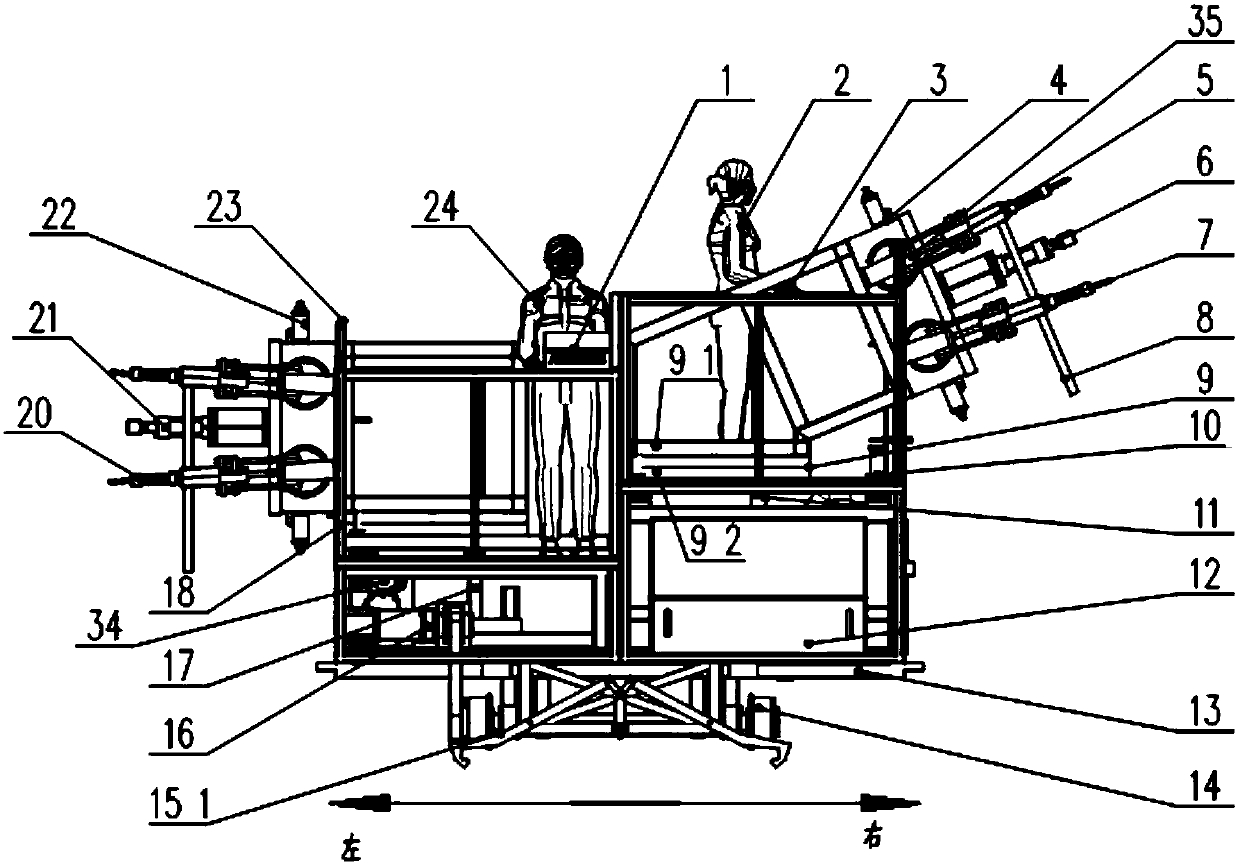
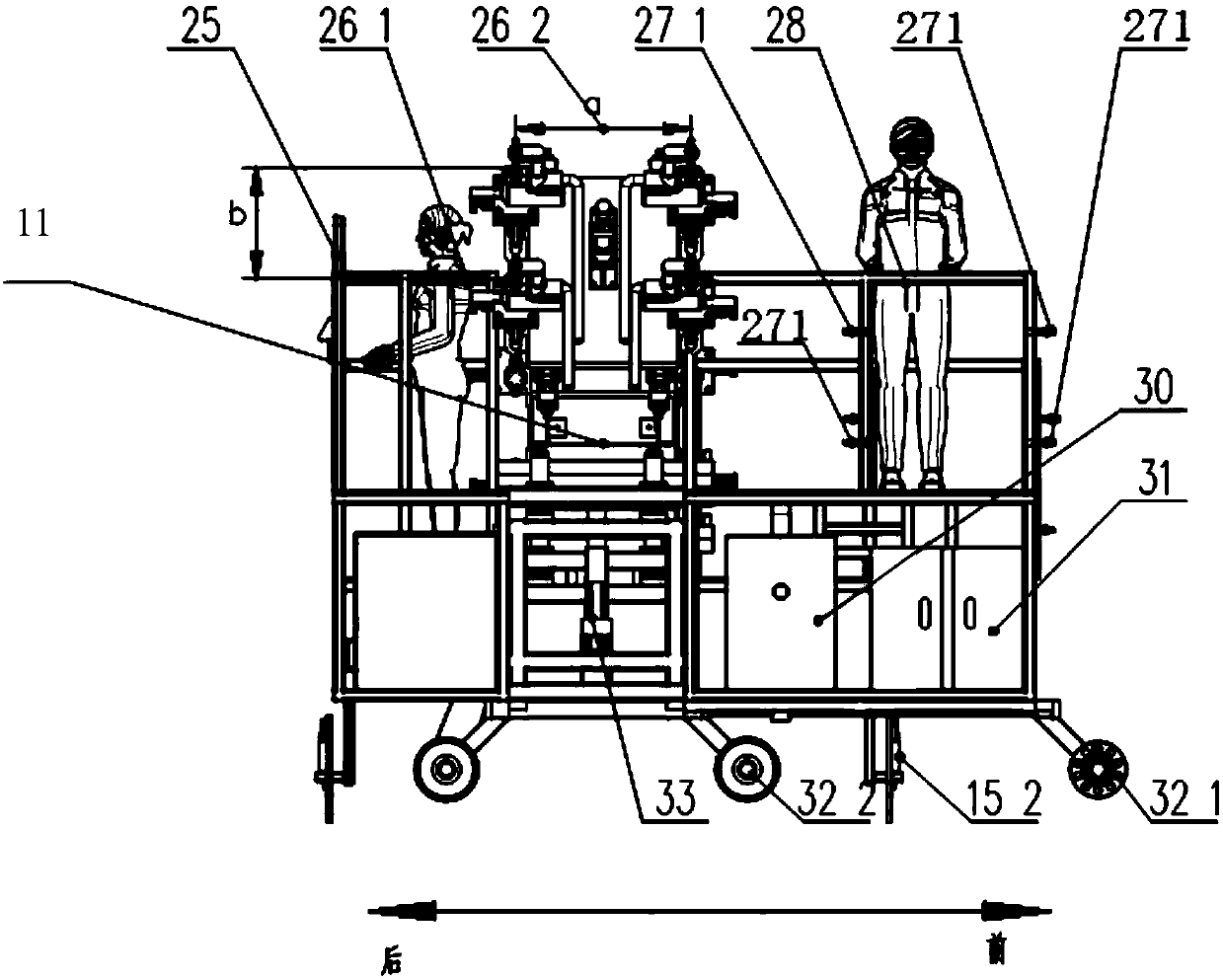
[0054] Such as figure 1 , figure 2 As shown, the present embodiment includes the control system 1, the bottom automatic walking positioning system, the left and right two groups of steel bar automatic detection and compensation systems and the left and right groups of drilling systems. The position of the drilling system is set according to the height of the part to be processed in actual processing. For ease of description, the figure 1 The steel bar automatic detection and compensation system and drilling system on the left are defined as the left steel bar automatic detection and compensation system and the left drilling system, and the steel bar automatic detection and compensation system and drilling system on the right are defined as the right steel bar automatic detection Compensation system and right drilling system.
[0055] The b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More