

Indoor-based walking microinertia autonomous navigation method
An autonomous navigation and micro-inertial technology, applied in the field of inertial navigation, can solve the problems of large errors of micro-inertial devices and unfavorable equipment autonomy, etc., and achieve the effect of suppressing the accumulation of heading errors, suppressing the divergence of positioning errors, and improving the positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0024] In order to further illustrate the technical means and effects adopted by the present invention, a detailed description will be given below in conjunction with the preferred implementation of the present invention and the accompanying drawings.
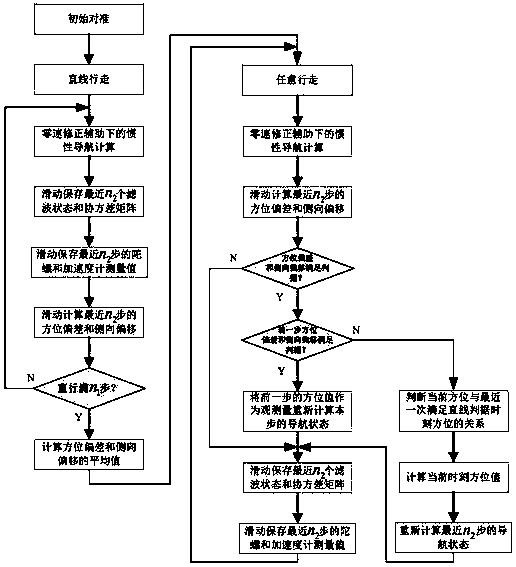
[0025] A micro-inertial autonomous navigation method based on indoor walking, including seven steps, specifically as follows:
[0026] Step 1. Initial alignment;
[0027] A known method is used for initial alignment to obtain an initial navigation state with high precision.
[0028] Step 2, calculating heading deviation and position deviation;
[0029] After the initial alignment is complete, walk along a straight line n 1 step, during which the inertial navigation calculation assisted by zero-speed correction is carried out, and the sliding calculation of the nearest n 2 Step heading deviation δψ i (i=1,2...a) and the lateral position deviation δP relative to the straight path i (i=1,2...a), where n 1 =n 2 +a-1,n 2 ≥3,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More