Active and passive training mode control system and method for rehabilitation robot based on electroencephalography
A rehabilitation robot and passive training technology, applied in muscle training equipment, passive exercise equipment, sports accessories, etc., can solve the problems of not being able to fully mobilize the patient's training initiative and the patient's control of the training speed of the rehabilitation robot, so as to improve enthusiasm and initiative Sexuality, prevent fatigue, and improve efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
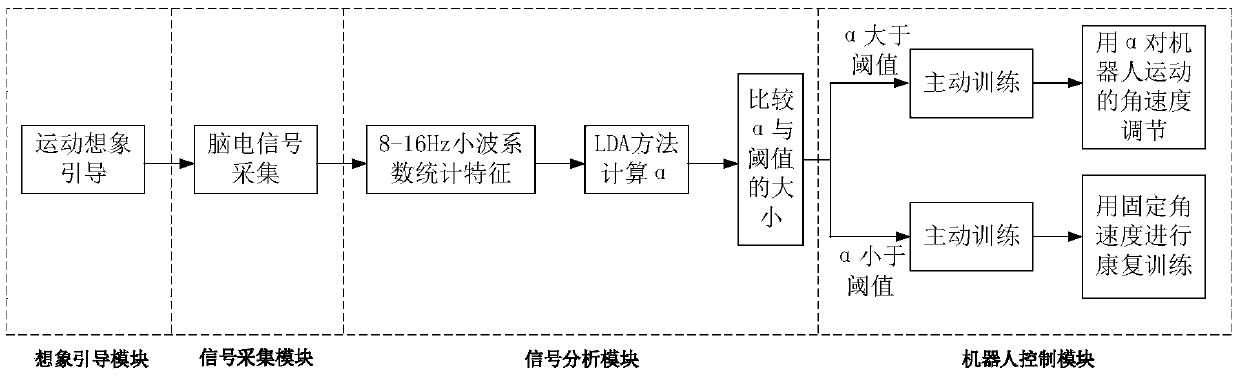
[0050]This embodiment provides an active and passive training mode control system for rehabilitation robots based on EEG, such as figure 1 shown, including:
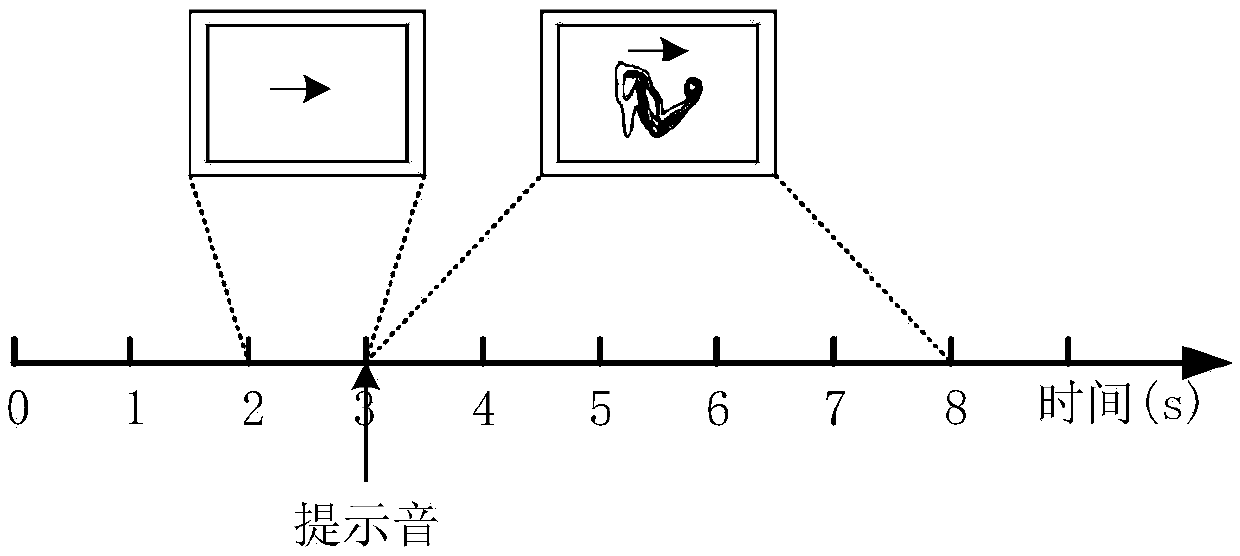
[0051] The imagination guidance module is used to play user-oriented motor imagination guidance audio and video, and induces the user to generate motor imagination EEG signals;
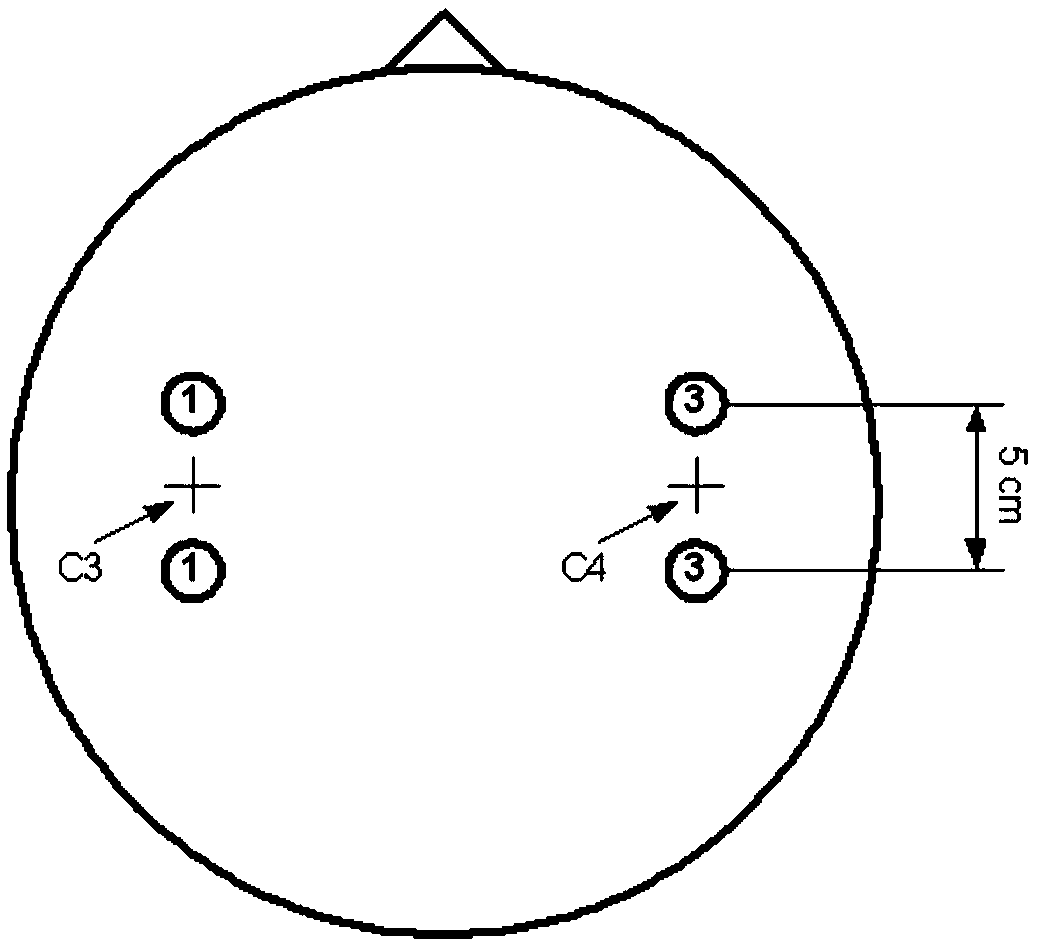
[0052] The signal acquisition module is used to collect motor imagery EEG signals generated by the user during audio and video playback, and perform preprocessing;
[0053] The signal processing module is used to decompose the signal output by the signal acquisition module into multi-layer wavelet, extract the wavelet coefficient of the preset frequency band signal, calculate the mean value, energy mean value and mean square error of the wavelet coefficient of the frequency band respectively, and use the linear discriminant classification algorithm ( Linear Discriminant Analysis, LDA) calculates the eigenvalue α in each imagination process of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More