

Dynamic model-based unmanned car model prediction controller design method
A technology of unmanned vehicles and dynamic models, applied in non-electric variable control, two-dimensional position/course control, vehicle position/route/height control, etc., can solve problems such as model state errors and achieve good control effects Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the purpose of the present invention, technical solutions and advantages clearer, the establishment of the new vehicle dynamics model, the design principle and solution method of the model predictive controller will be further explained below, and the following specific design methods are used to explain the present invention. invention, but not limited to the present invention.
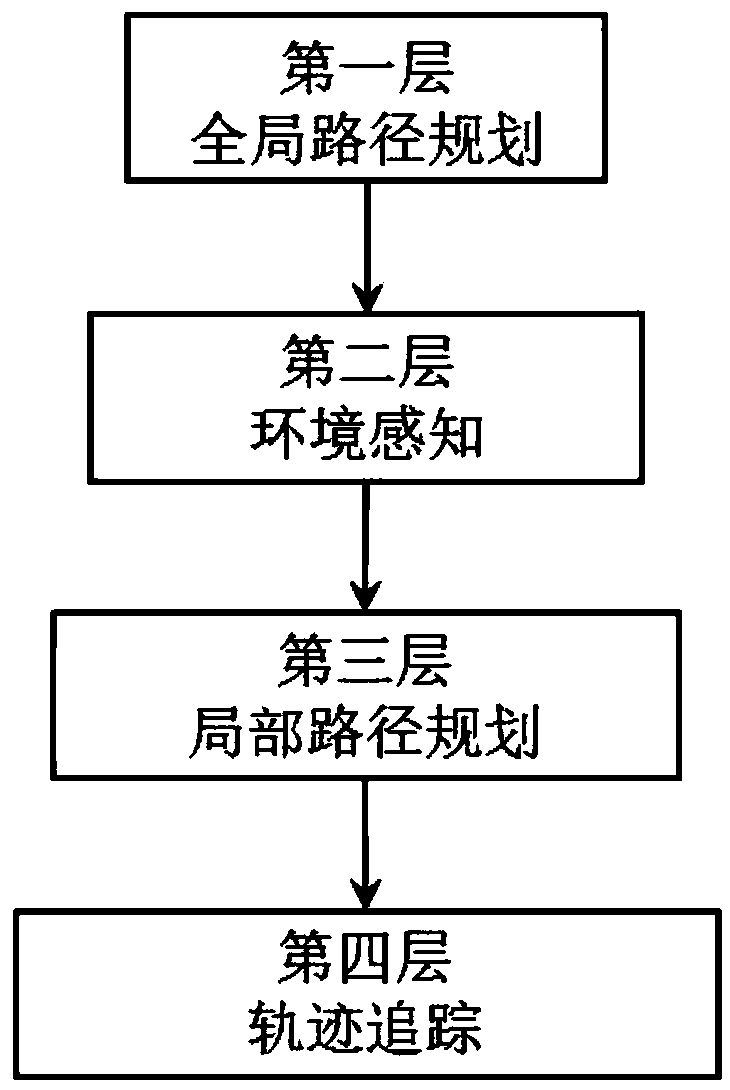
[0053] The unmanned vehicle model predictive controller design method based on dynamics model of the present invention comprises the following steps:
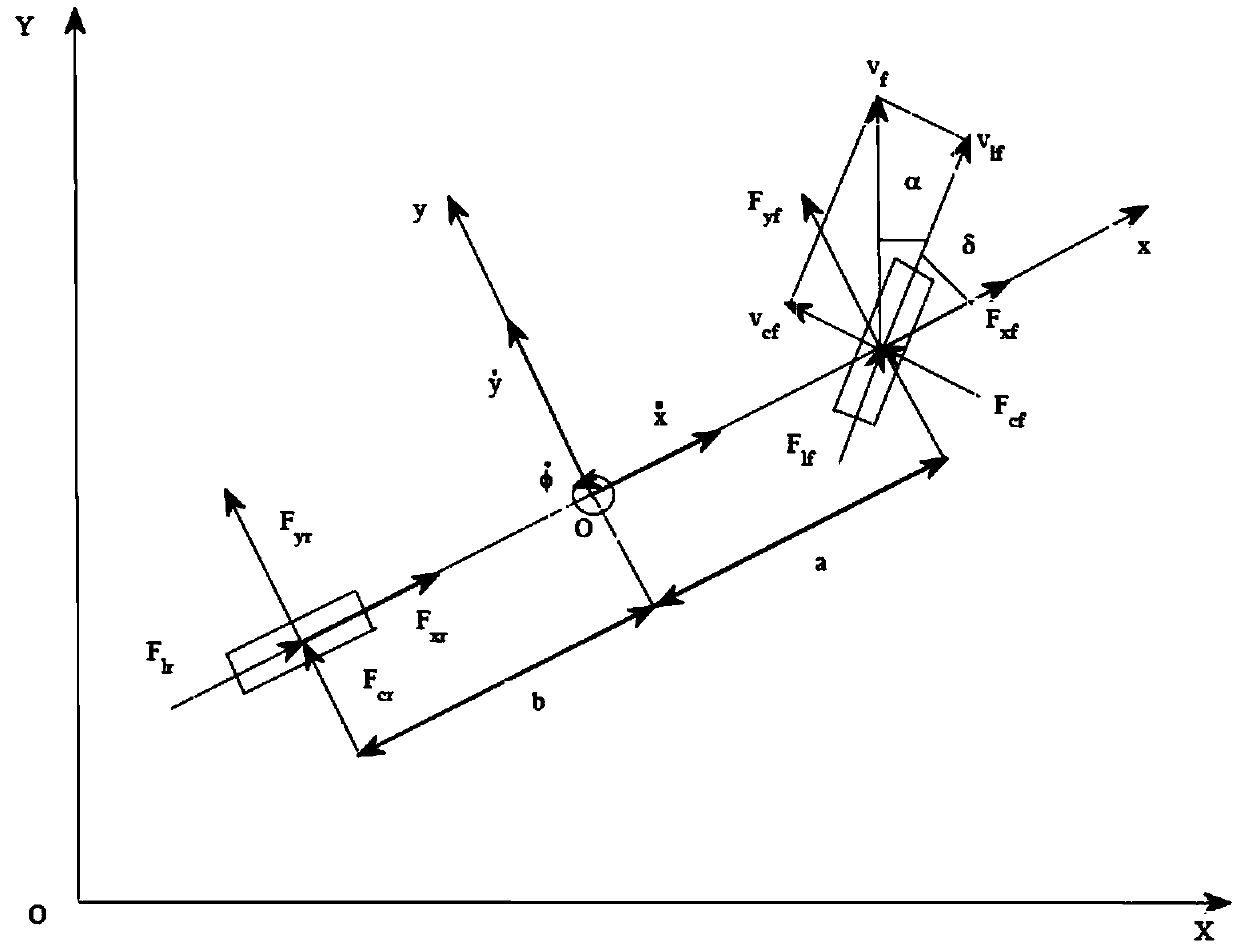
[0054] Step 1: Establish a new vehicle dynamics model
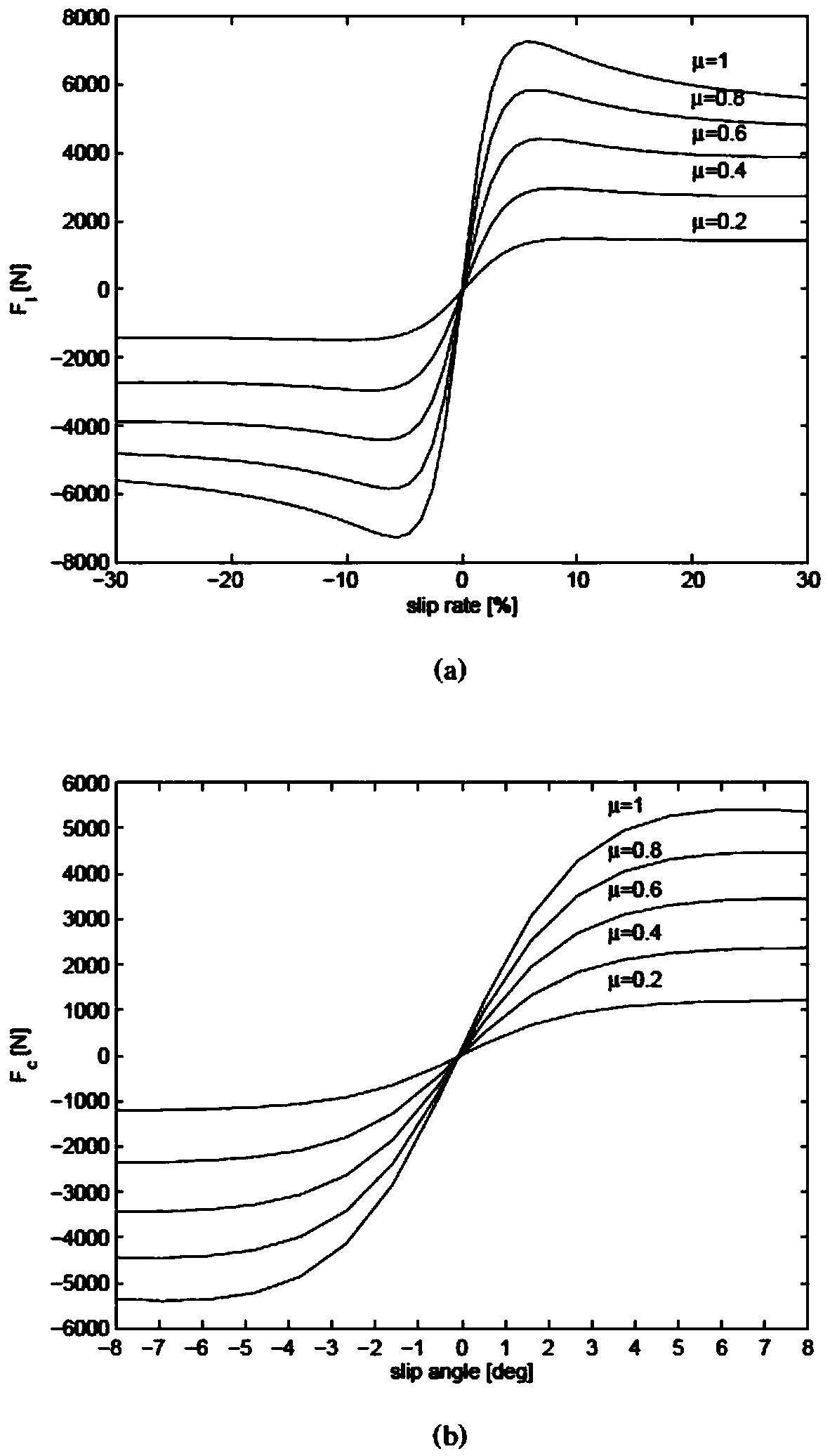
[0055] Apart from gravity and air resistance, nearly all of the significant forces on a car act directly on the tires. Because of the complexity and nonlinearity of tire forces, choosing an appropriate tire model is crucial for establishing an accurate vehicle dynamics model. The present invention uses the tire lateral force and traction model proposed by Pacejka. The m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More