

Frequency estimation device, terminal and computer readable medium
A frequency estimation and frequency technology, applied in the field of GNSS, can solve the problems of inability to quickly achieve continuous wave interference suppression, difficult continuous wave interference signal detection, inability to quickly and accurately estimate, etc., to improve operation efficiency, improve tracking sensitivity, and improve speed. and efficiency effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
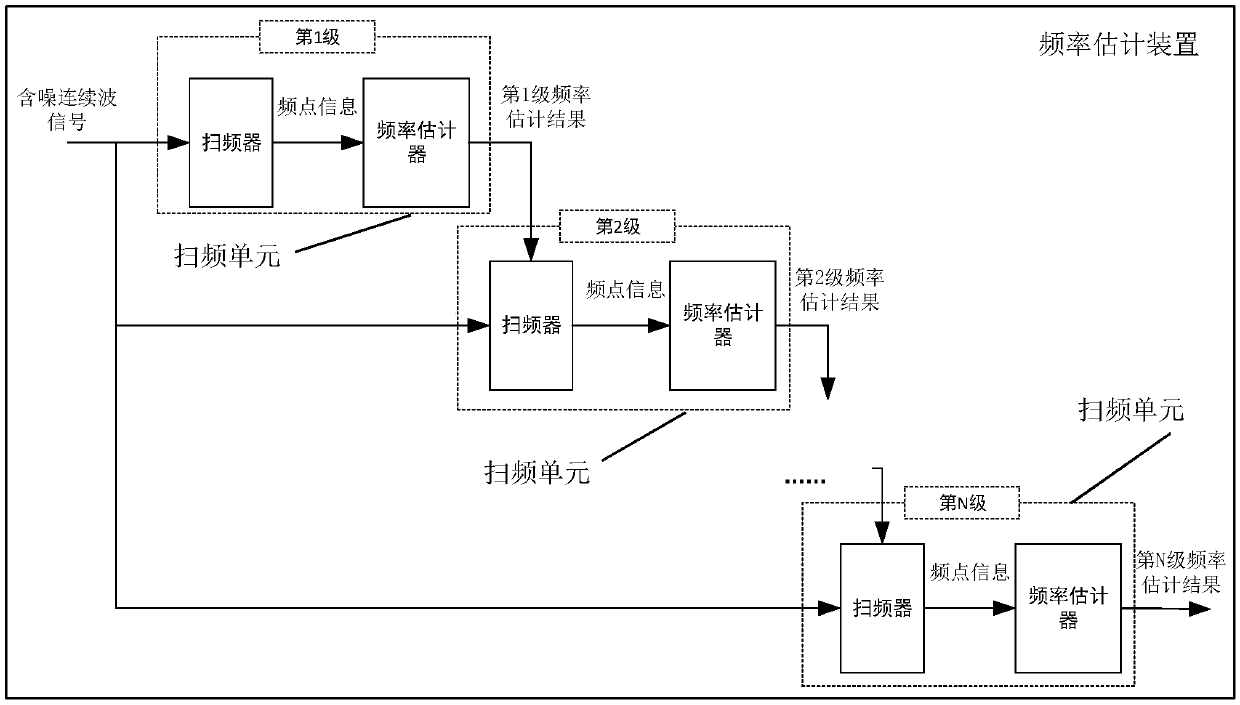
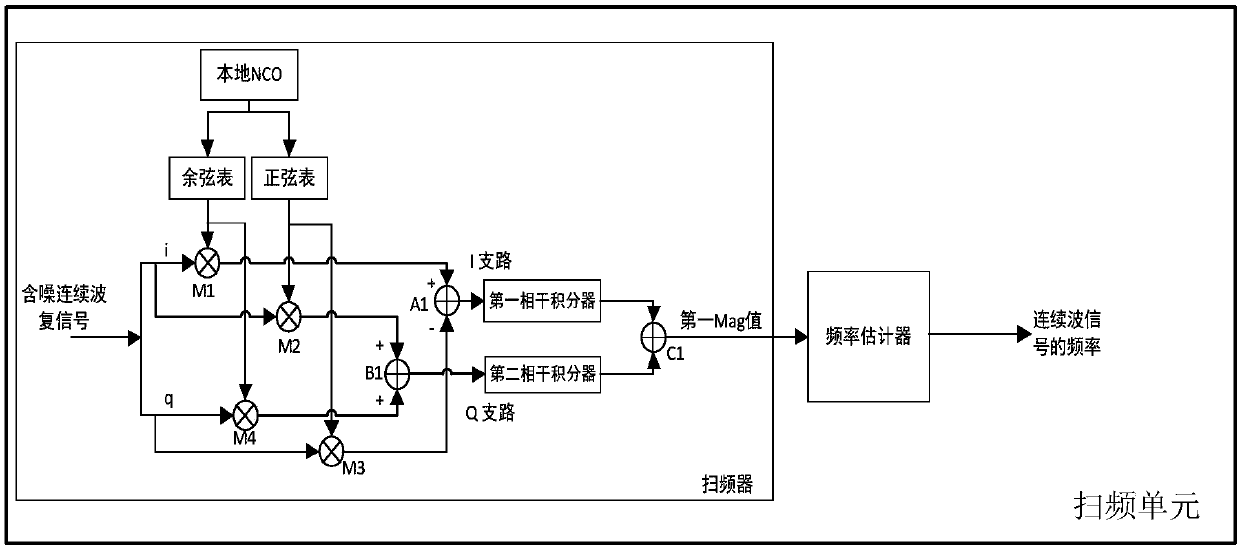
[0046] Embodiment one, such as figure 1 and 2 As shown, the frequency sweep unit includes:
[0047] a frequency estimator for estimating and outputting the frequency of the continuous wave signal; and
[0048] A frequency sweeper, connected to the frequency estimator, used to output data such as frequency point information, the frequency sweeper includes:
[0049] The local NCO outputs sine and cosine signals (correspondingly through the sine table and cosine table), and the local carrier m generated by the local NCO adopts the following formula: is the carrier phase, and j is the imaginary unit of the complex number;
[0050] The noise-containing continuous wave complex signal s input to the frequency sweeper adopts the following formula: s=i+qj, i is the signal of the positive phase branch (I branch), and q is the signal of the quadrature branch (Q branch) , j is the imaginary part of the complex number,
[0051] The first multiplier M1 multiplies the input signal i ...
Embodiment 2
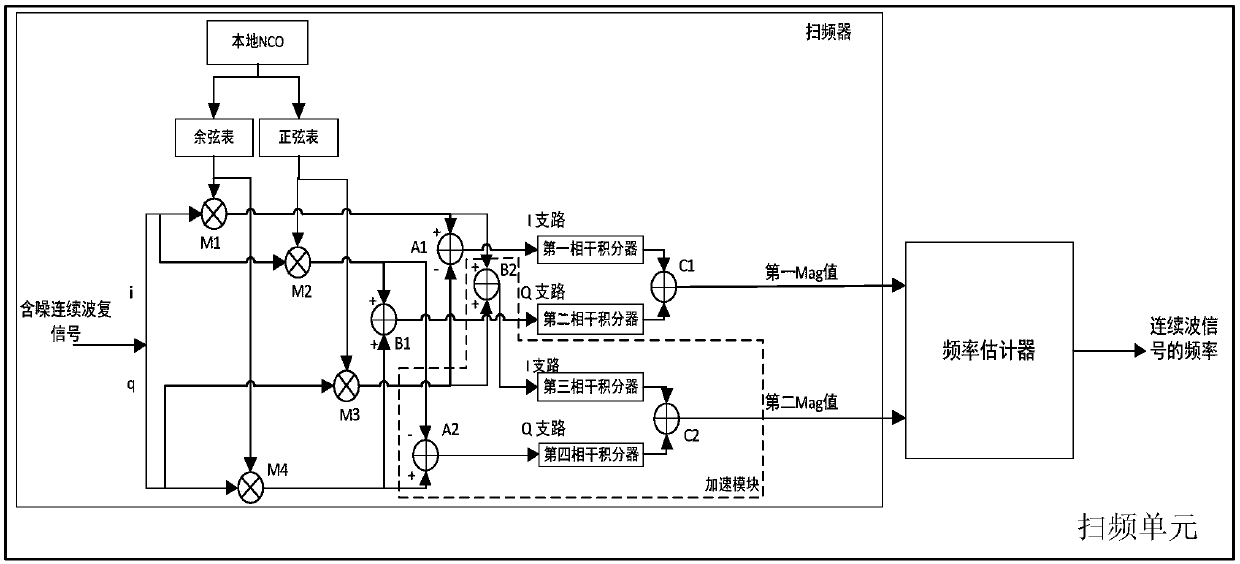
[0062] Embodiment two, such as image 3 As shown, the same parts of Embodiment 2 and Embodiment 1 will not be repeated, and the difference is that the frequency sweeper also includes an acceleration module, wherein the acceleration module includes:
[0063] The second adder B2 is connected to the first multiplier M1 and the third multiplier M3, adds the first signal and the third signal, and outputs the positive phase branch mixing result of the negative mixing signal;
[0064] The third coherent integrator, connected to the second adder B2, performs coherent integration calculation according to the positive-phase branch mixing result of the received negative-going mixing signal, and outputs the third coherent integration result;
[0065] The second subtractor A2 is connected to the second multiplier M2 and the fourth multiplier M4, subtracts the fourth signal from the second signal, and outputs the quadrature branch mixing result of the negative mixing signal;
[0066] The f...
Embodiment 3
[0080] Embodiment three, such as Figure 4 As shown, the same parts of Embodiment 3 and Embodiment 2 will not be repeated, the difference is that the frequency sweeper also includes a first non-coherent integrator and a second non-coherent integrator, wherein,
[0081] The first non-coherent integrator is connected to the first amplitude calculator C1 and the frequency estimator, the first non-coherent integrator receives the first MAG value, and performs non-coherent integration calculation to obtain the first non-coherent integration result;
[0082] The second non-coherent integrator is connected to the second amplitude calculator C2 and the frequency estimator, the second non-coherent integrator receives the second MAG value, and performs non-coherent integration calculation to obtain a second non-coherent integration result;
[0083] The frequency estimator estimates and outputs the frequency of the continuous wave signal according to the received first and second non-coh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More