

Wave beam space direction finding method under impact noise environment
A technology of shock noise and beam, applied in the field of beam space direction finding, which can solve the problems of complex calculation, local convergence, quantization error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
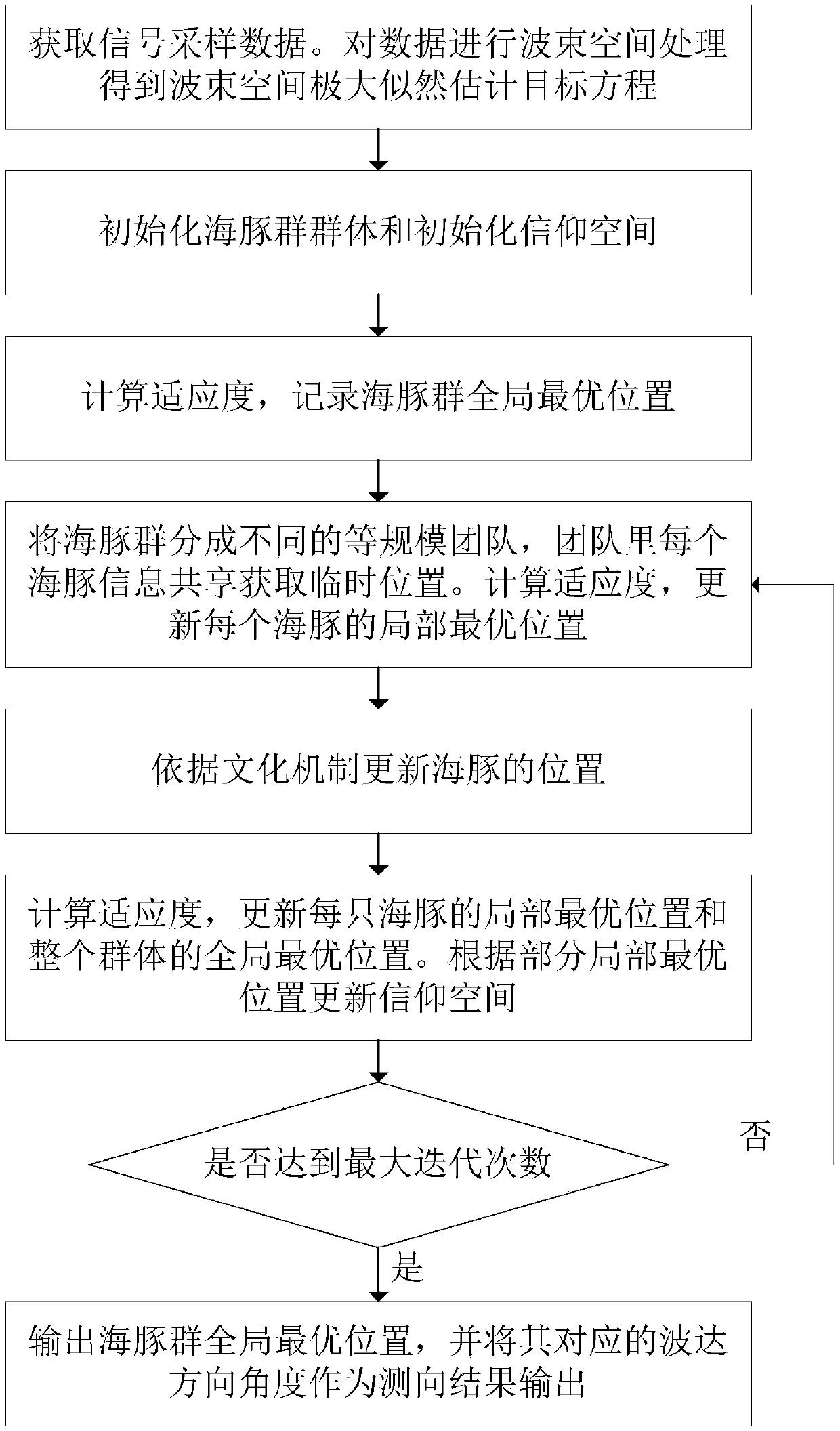
[0088] Such as figure 1 as shown, figure 1 It is a flow chart of the beam space direction finding method under the impact noise environment of the present invention, and the beam space direction finding method under the impact noise environment of the present invention specifically includes steps;
[0089] S1. Acquire signal sampling data, perform beam space processing on the signal sampling data, and obtain an objective equation of beam space maximum likelihood estimation;
[0090] S2, initialize the dolphin group and initialize the belief space;
[0091] S3, calculate the fitness, and record the global optimal position of the dolphin group;
[0092] S4, divide the group of dolphins into different teams of equal size, each dolphin in the team obtains the temporary position of the individual dolphin according to information sharing; calculate the fitness according to the temporary position of the individual dolphin, and update the local optimum of each dolphin Location;
...
Embodiment 2
[0101] Specifically, in the step S1, assuming that N far-field narrowband signals are incident on a uniform linear array with M array elements, the k-th snapshot data is written in vector form; the k-th snapshot The expression of the data is:
[0102]
[0103] Among them, E(k) is the snapshot data vector, is the impact noise data vector, S(k) is the space signal vector, A(θ) is the M×N dimensional array flow pattern matrix; θ is the arrival angle vector.
[0104] The arrival angle vector θ=[θ 1 , θ 2 ,...,θ N ],
[0105] Among them, θ i is the angle between the incident direction of the i-th signal and the normal line of the line array, i=1, 2,...,N.
[0106] The expression of the M * N-dimensional array flow pattern matrix A (θ) is:
[0107] A(θ)=[a 1 (ω 0 ), a 2 (ω 0 ),...,a N (ω 0 )],
[0108] Among them, the steering vector of the i-th signal is:
[0109]
[0110] Among them, τ li Indicates the time delay when the i-th signal arrives at the l-th arra...
Embodiment 3
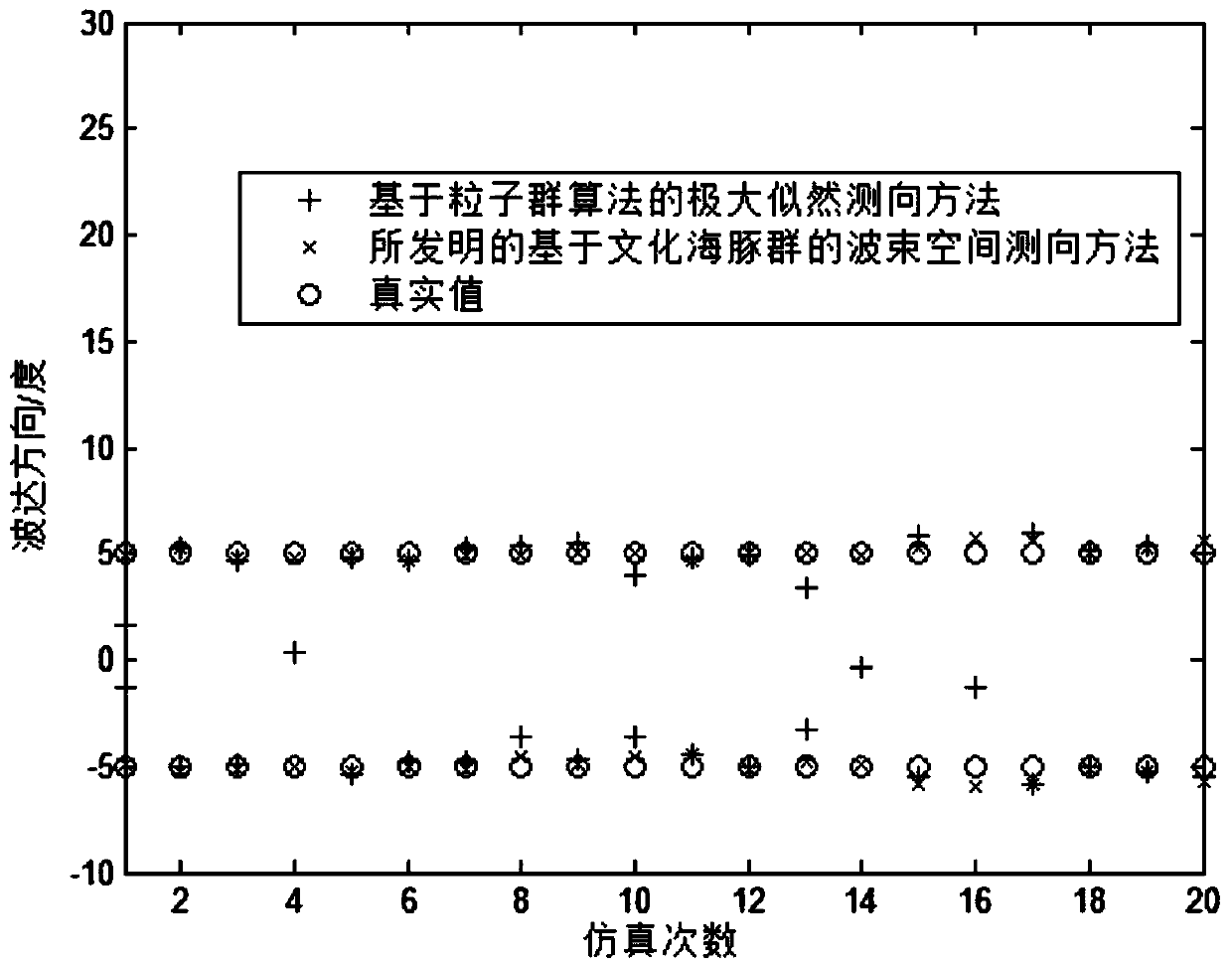
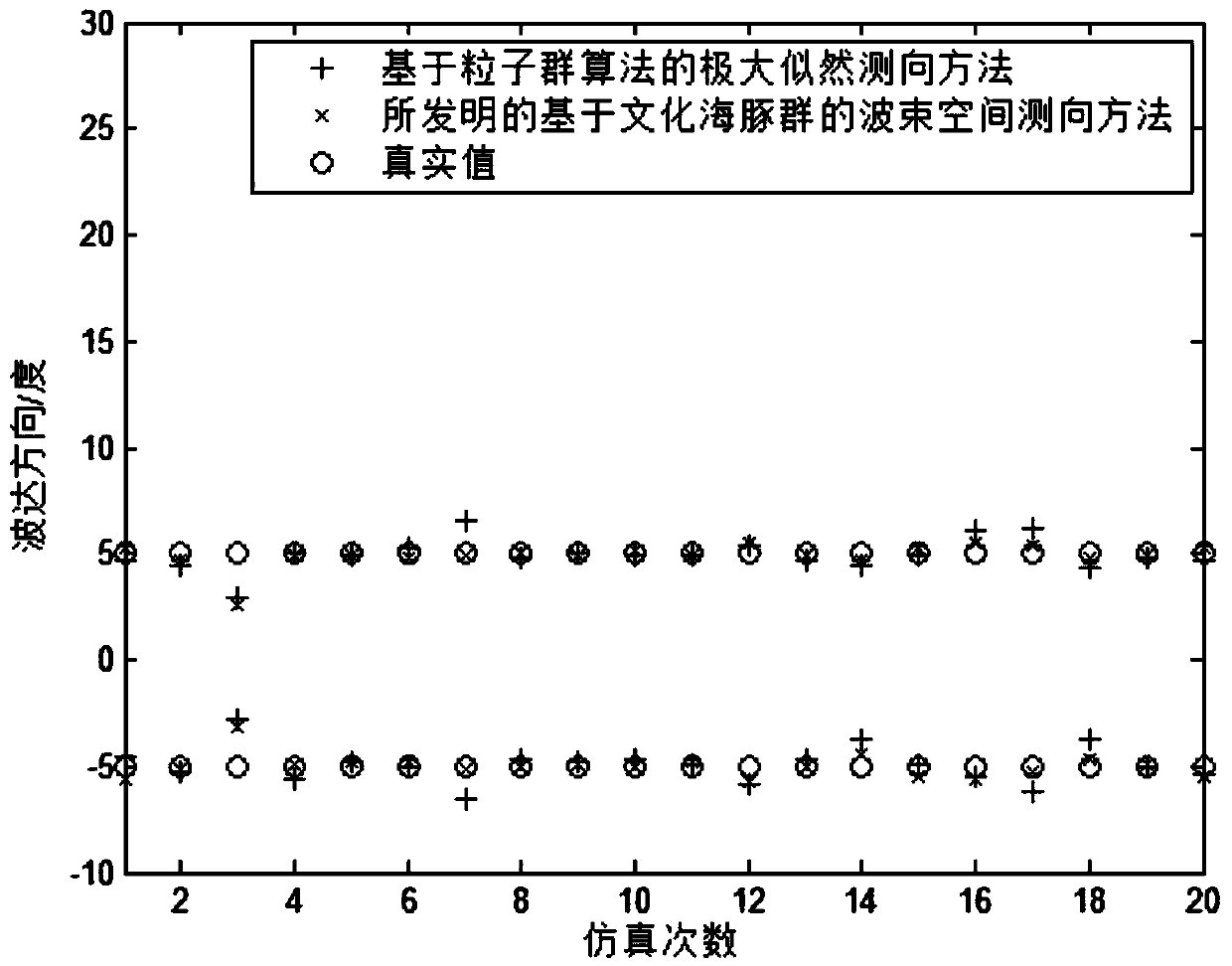
[0170] The method to be compared is the maximum likelihood direction finding method based on the particle swarm algorithm in the prior art. In the direction finding system, the distance between array elements is 1 / 2 wavelength, the number of antennas M=8, the number of beams B=4, the number of information sources N=2, and the number of snapshot samples K=100. The population size of the particle swarm optimization algorithm is the same as that of the cultural dolphin swarm, the number of termination iterations is set to be twice that of the cultural dolphin swarm, and other parameters are the same as those of the classical particle swarm optimization algorithm. The simulation parameters of the designed culture-based dolphin group are: z max =60, η=0.06, c 1 =c 2 = 2,
[0171] figure 2 In , two independent signal sources are injected from {-5°, 5°} directions, the characteristic index is 1.7, the generalized signal-to-noise ratio is 10dB, and the number of Monte Carlo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More