Underwater image processing system of remote operated vehicle
An underwater robot, underwater image technology, applied in image data processing, details involving image processing hardware, image enhancement, etc., can solve the problem of poor underwater image contrast, underwater image flashback, underwater image color cast and other problems, to achieve the effect of suitable brightness, low energy consumption and strong real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
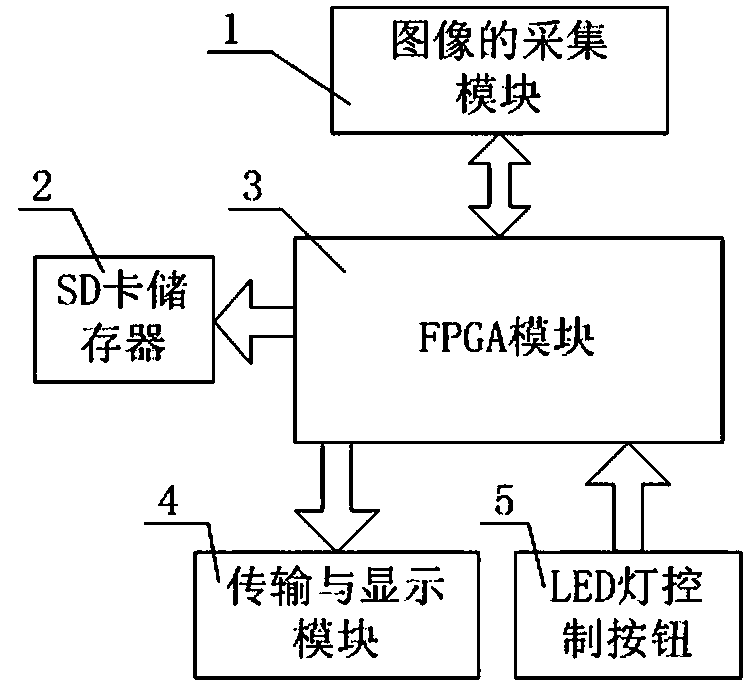
[0022] The invention provides an underwater image processing of an underwater robot constructed by constructing a SoC system based on a Field Programmable Logic Gate Array (FPGA). The system proposed by the present invention belongs to the field of underwater image processing, and is specifically a kind of device of an underwater image real-time processing system, which realizes real-time processing and transmission of underwater images, such as figure 1 As shown, the system includes the image acquisition, image processing, image transmission and image display design modules of the underwater robot. The underwater camera is sealed with a high-permeability plexiglass cover. This invention is used on a cabled underwater robot and can be extended to other underwater products. It is mainly used for image collection, image storage and image di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com