

PID parameter tuning method for particle swarm optimization based on inertia weight cosine adjustment
A technology of particle swarm optimization and inertia weight, applied to controllers with specific characteristics, electric controllers, etc., can solve problems such as algorithms falling into local optimal solutions, and achieve short adjustment time, small inertia weight, and fast change rate Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] Preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
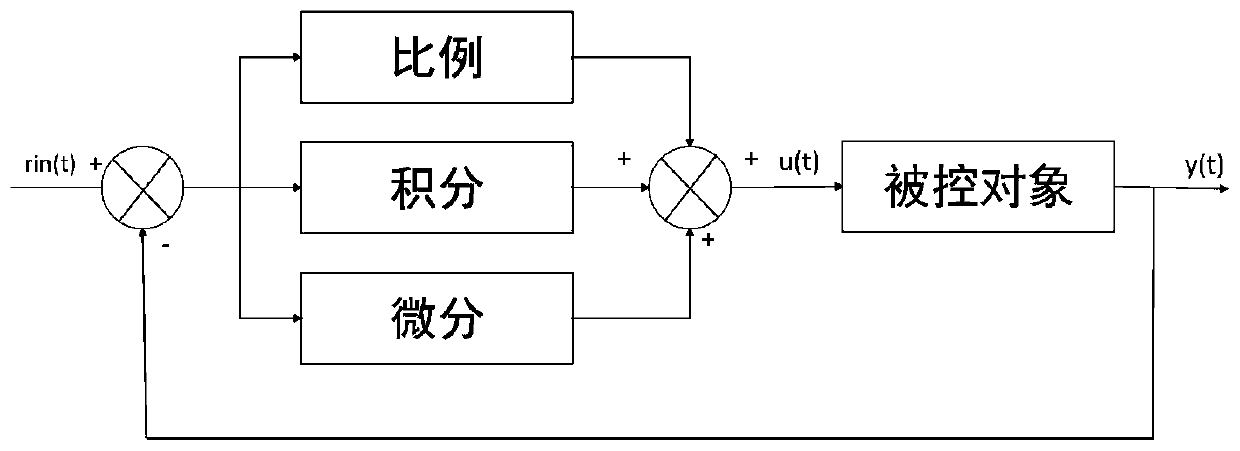
[0047] Such as figure 1 as shown, figure 1 It is the PID schematic diagram adopted by the PID controller in the prior art. The PID controller (proportional-integral-differential controller) is a common feedback loop component in industrial control applications. It consists of a proportional unit P, an integral unit I and a differential unit D composition. PID control is proportional to the magnitude of the response deviation; integral control can eliminate steady-state errors, but may increase overshoot; differential control can speed up the response speed of large inertial systems and weaken the overshoot tendency, which introduces an effective early stage in the control system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More