

Method for establishing autonomous mobile robot navigation system through virtual environment
A technology of virtual environment and autonomous movement, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as insufficient flexibility, low data utilization, and inability to cope with dynamic scenes well
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Below in conjunction with specific embodiment, further illustrate the present invention. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
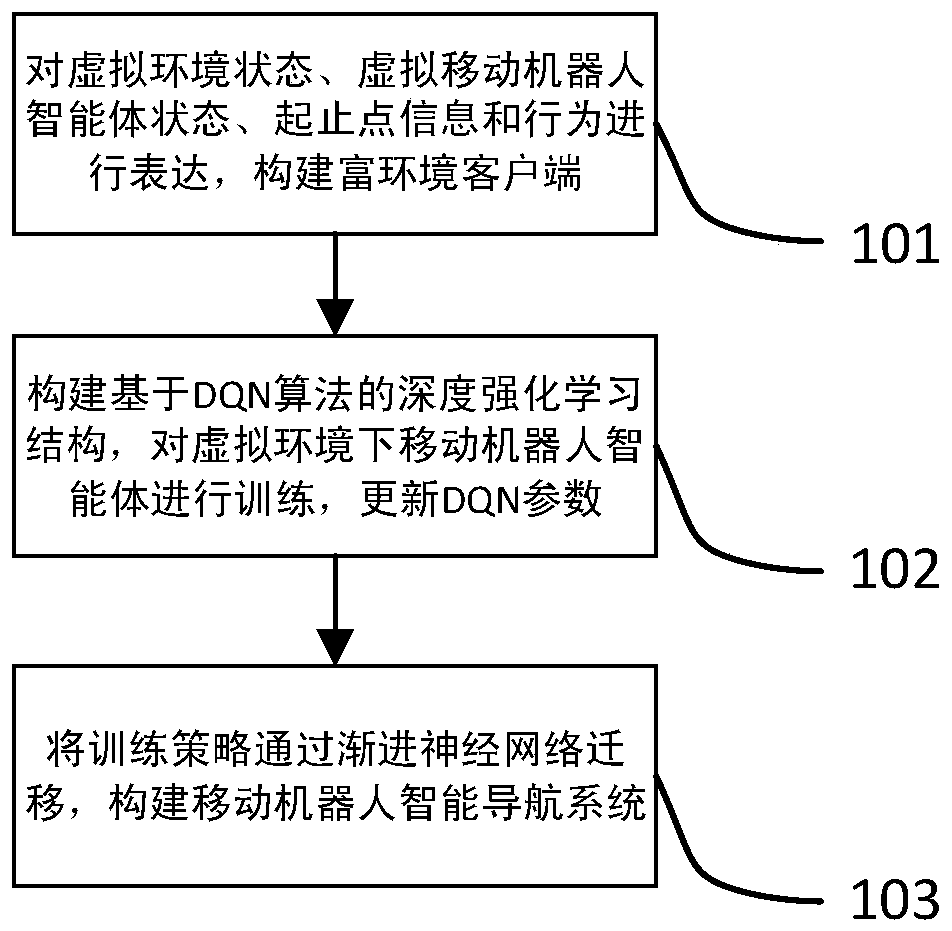
[0024] combine figure 1 , a kind of method that the present invention provides through virtual environment establishes autonomous mobile robot navigation system comprises the following steps:
[0025] Step 101, express the state of the virtual environment, the state of the virtual mobile robot agent, the information of the starting point, the information of the target point and the behavior, and build a rich environment client...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More