

Chaos total state hybrid projection synchronization method based on active integral sliding mode
An integral sliding mode and full-state technology, which is applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve the problem that the synchronization error cannot converge to zero, and achieve weakened chattering, fast speed, and good robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0090] Taking the 2-dimensional chaotic system as an example, the driving system is a Duffing chaotic system, and the response system is a van der Pol chaotic system with modeling uncertainties and external interference signals.
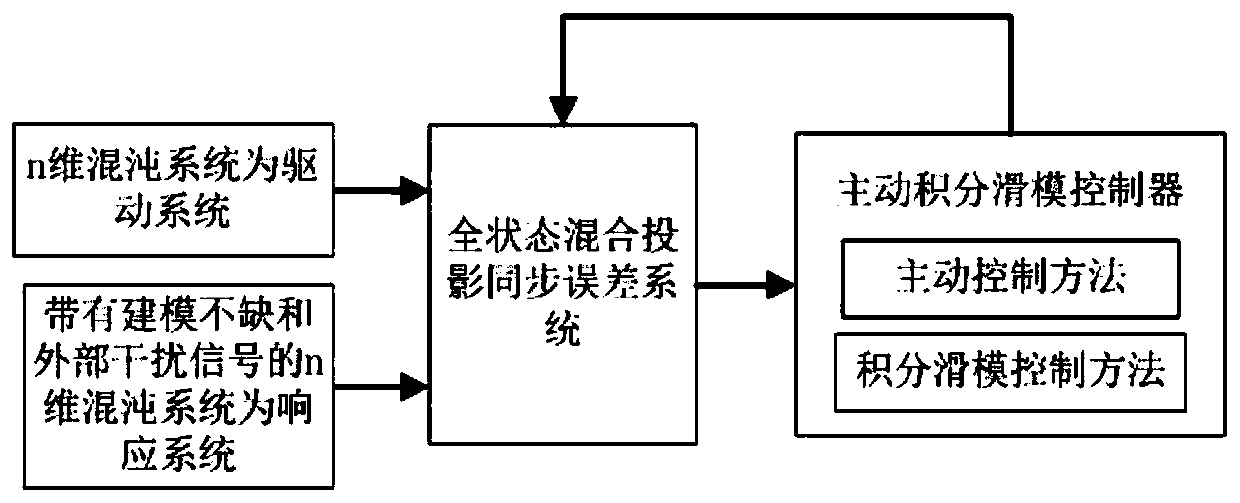
[0091] Step 1: The driving system is a Duffing chaotic system, and the response system is a van der Pol chaotic system with modeling uncertainties and external interference signals. According to the driving system and response system, a full-state hybrid projection synchronization error system is established.
[0092] The driving system is a 2-dimensional Duffing chaotic system, and the state equation is expressed as:
[0093]
[0094] where x 1 and x 2 is the state variable of the Duffing chaotic system, x=[x 1 ,x 2 ] T , t is time, f 1 (x, t) and f 2 (x,t) is a continuous function.
[0095] The response system is a 2-dimensional van der Pol chaotic system with modeling uncertainties and external disturbance signals, and the state equation...
specific Embodiment 2
[0123] Taking the 3D chaotic system as an example, the full-state hybrid projection synchronization control is carried out. The driving system is Chen chaos, and the response system is Lorenz chaos with modeling uncertainties and external disturbance signals.
[0124] Step 1: The driving system is a 3-dimensional Chen chaos, and the response system is a 3-dimensional Lorenz chaos with modeling uncertainties and external interference signals. According to the driving system and the response system, a full-state hybrid projection synchronization error system is established.
[0125] The driving system is a 3-dimensional Chen chaos, and the state equation is expressed as
[0126]
[0127] where x 1 , x 2 and x 3 is the state variable of Chen’s chaotic system, x=[x 1 ,x 2 ,x 3 ] T , t is time, f 1 (x,t), f 2 (x, t) and f 3 (x, t) is a continuous function.
[0128] The response system is Lorenz chaos with modeling uncertainties and external disturbance signals, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More