

Kalman Filtering Method Based on Amplitude Information
A technology of Kalman filtering and amplitude information, applied in the field of radar, can solve problems such as the mismatch of observation noise statistical information, affecting the tracking accuracy of state estimation, and effective estimation of hard-to-observe noise statistical information, so as to reduce the amount of calculation, improve efficiency and The effect of quality and ease of engineering realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
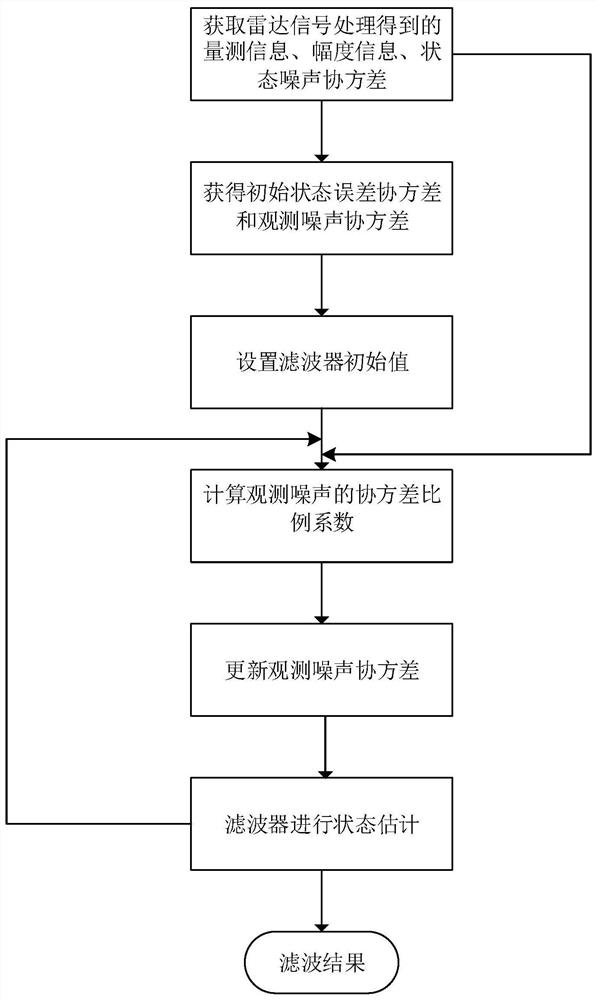
[0024] The present invention is described in detail below in conjunction with accompanying drawing:
[0025] The Kalman filtering method based on amplitude information of the present invention is applicable to the scene where the target motion state is represented by a linear equation in a discrete time system, and the target motion state equation in this scene is:
[0026] X(k+1)=F(k)X(k)+G(k)u(k)+V(k), k=1, 2,...,
[0027] Among them, k is the scan period, F(k) is the state transition matrix, X(k) is the state of the discrete dynamic system in the kth scan period; G(k) is the input control matrix; u(k) is the known input Or the control signal; V(k) is the process noise, and its covariance is Q(k).
[0028] In this scenario, according to the target motion state equation X(k+1), the measurement information Z(k+1) received by the filter is expressed as:
[0029] Z(k+1)=H(k+1) X(k+1)+W(k+1)
[0030] Among them, H(k+1) is the measurement matrix, W(k+1) is the observation noise...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More