

Automatic ball picking robot and ball picking method
A robot and automatic technology, applied in the direction of ball games, sports accessories, etc., to simplify the sorting and loading process, save manpower, and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
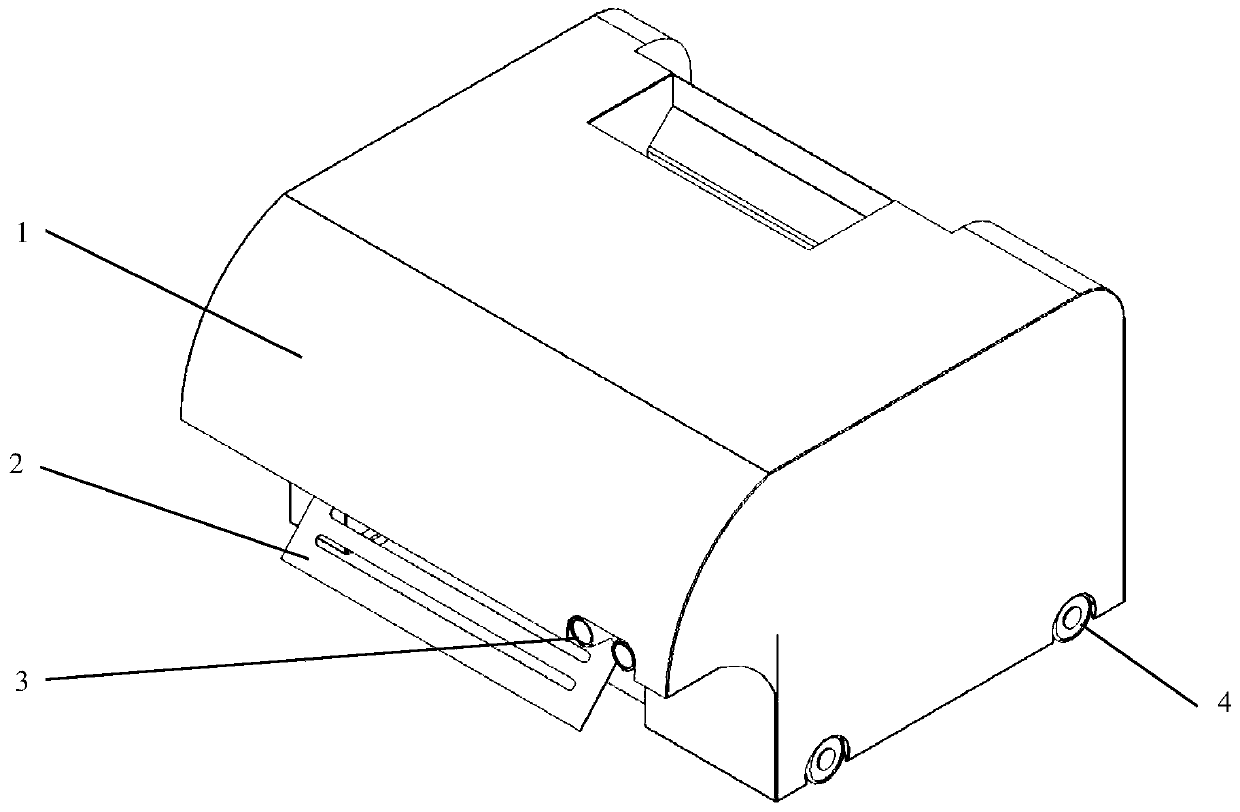
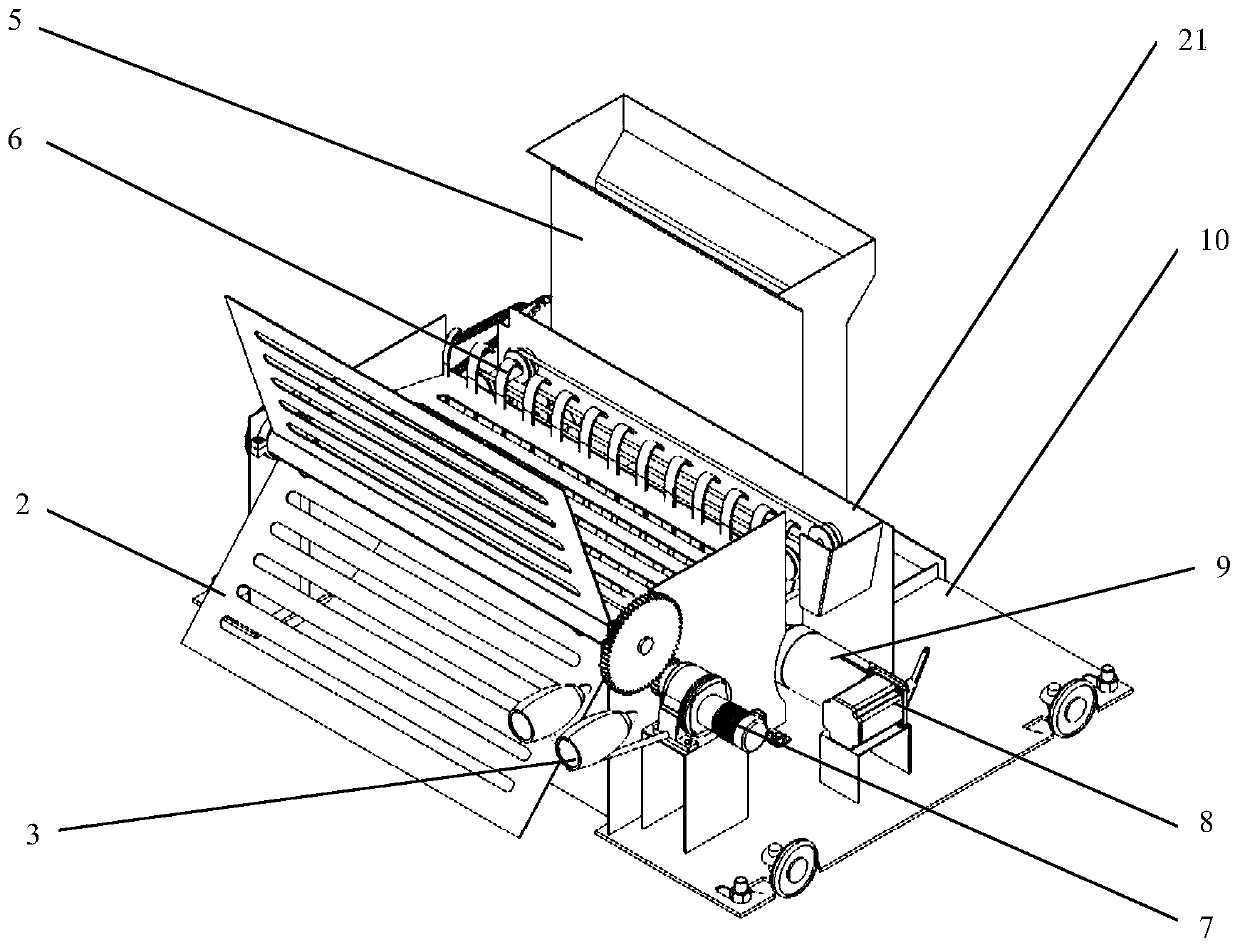
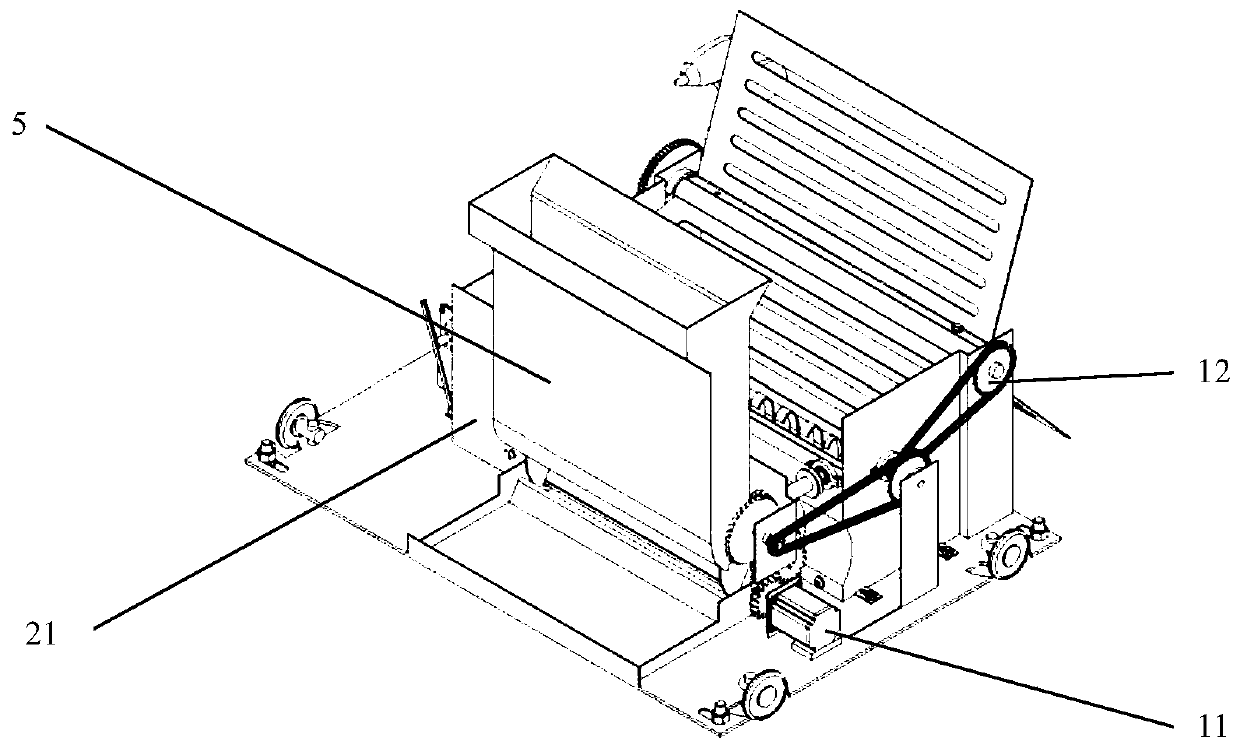
[0057] Embodiment 1, automatically picks up the ball robot, as Figure 1-13 As shown, it includes a body shell 1 and a robot chassis 10 with a single-chip microcomputer.
[0058] The body shell 1 is a box structure with a hollow inside, and the body shell 1 is covered on the top of the robot chassis 10 .
[0059] The robot chassis 10 is equipped with four driving wheels 4 at four corners, and the front end of the robot chassis 10 is provided with a power supply module that provides electric energy, and the power supply module is connected with each motor. Control System;
[0060]The image processing system includes a camera 3 , a cloud platform and a digital image module; The digital image module is an FPGA module, which is used for data processing and storage of the image collected by the camera 3, so as to judge whether there is a badminton in the image. Camera 3 is a CMOS camera.
[0061] The multi-sensor information data processing system includes an ultrasonic ranging...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More