

Puncture robot navigation system with dynamic compensation function based on binocular vision
A dynamic compensation and binocular vision technology, applied in the field of navigation, can solve the problems of inaccurate positioning of puncture lesions, increasing the difficulty of puncture for doctors, and difficulty in puncture path planning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the technical solution of the present invention clearer and clearer to those skilled in the art, the present invention will be described in further detail below in conjunction with the examples and accompanying drawings, but the embodiments of the present invention are not limited thereto.
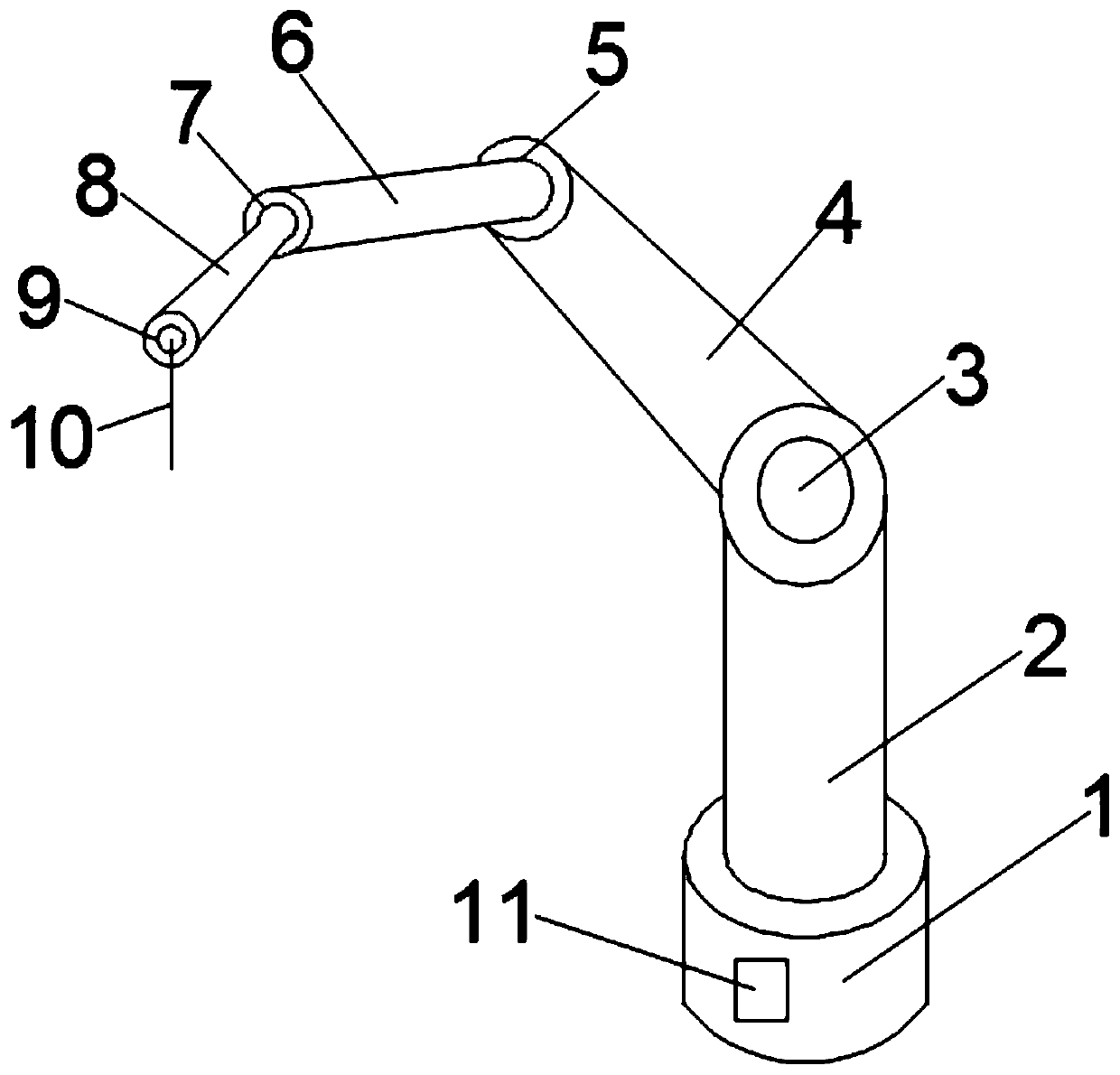
[0074] Such as figure 1 As shown, the puncture robot navigation system based on the dynamic compensation function of binocular vision includes a base 1, a support column 2 is installed on the top of the base 1, and a first link block 3 is attached to the top of the support column 2. The outside of a link block 3 is equipped with a first transfer arm 4, and one end of the first transfer arm 4 is connected with a second link block 5, and the outside of the second link block 5 is equipped with a second transfer arm 6, and the second The outside of the handover arm 6 is handed over with a third link block 7, the outside of the third link block 7 is equipped with a third...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More