

Cooperative control method of multi-unmanned aerial vehicle formation based on model predictive control
A model predictive control, multi-UAV technology, applied in non-electric variable control, control/regulation systems, 3D position/channel control, etc. The effect of high precision, simple solution process and low computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
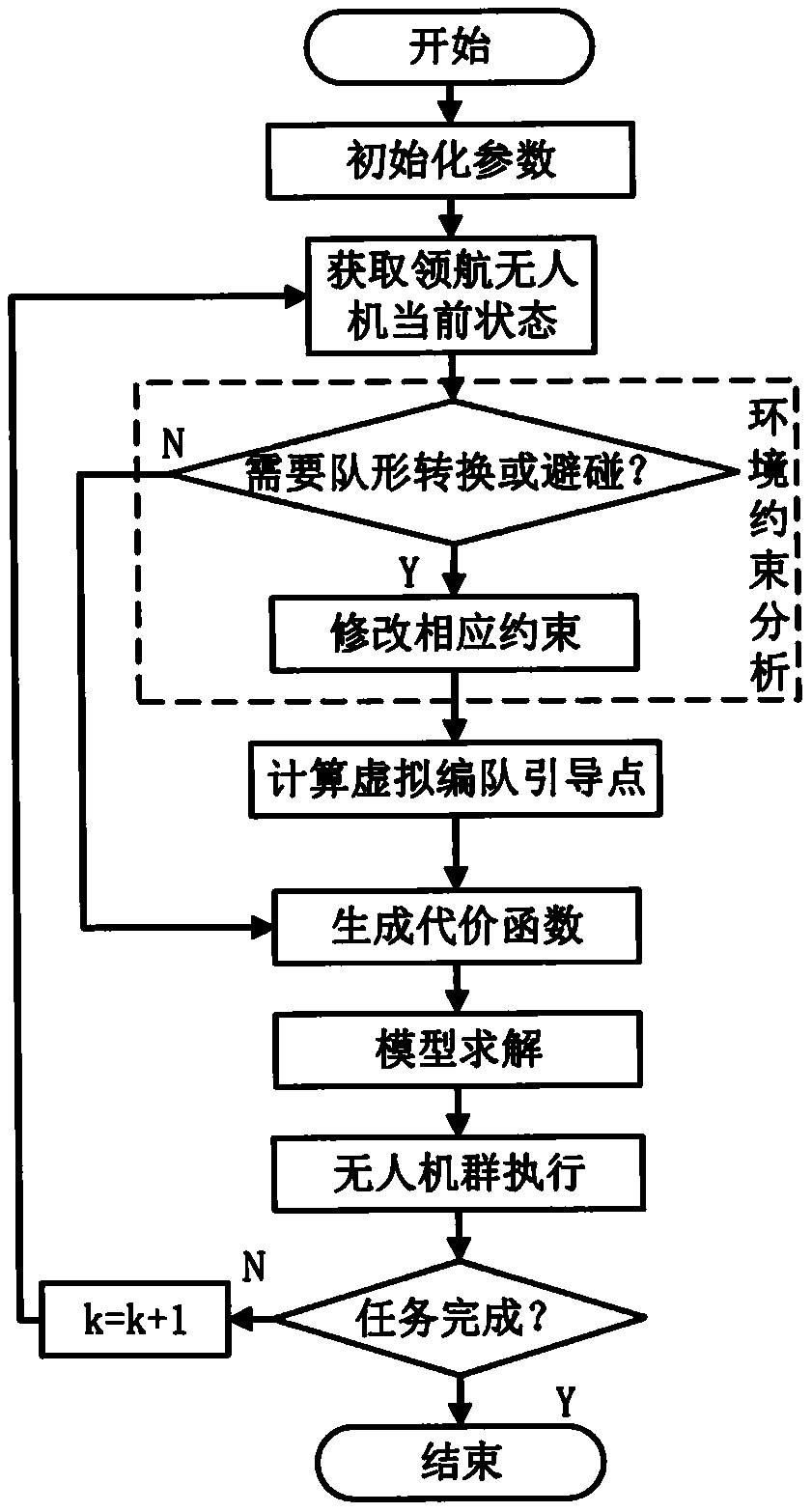
[0030] Embodiment: a flow chart of a method for coordinated control of three UAV formations based on model predictive control, including the following steps:
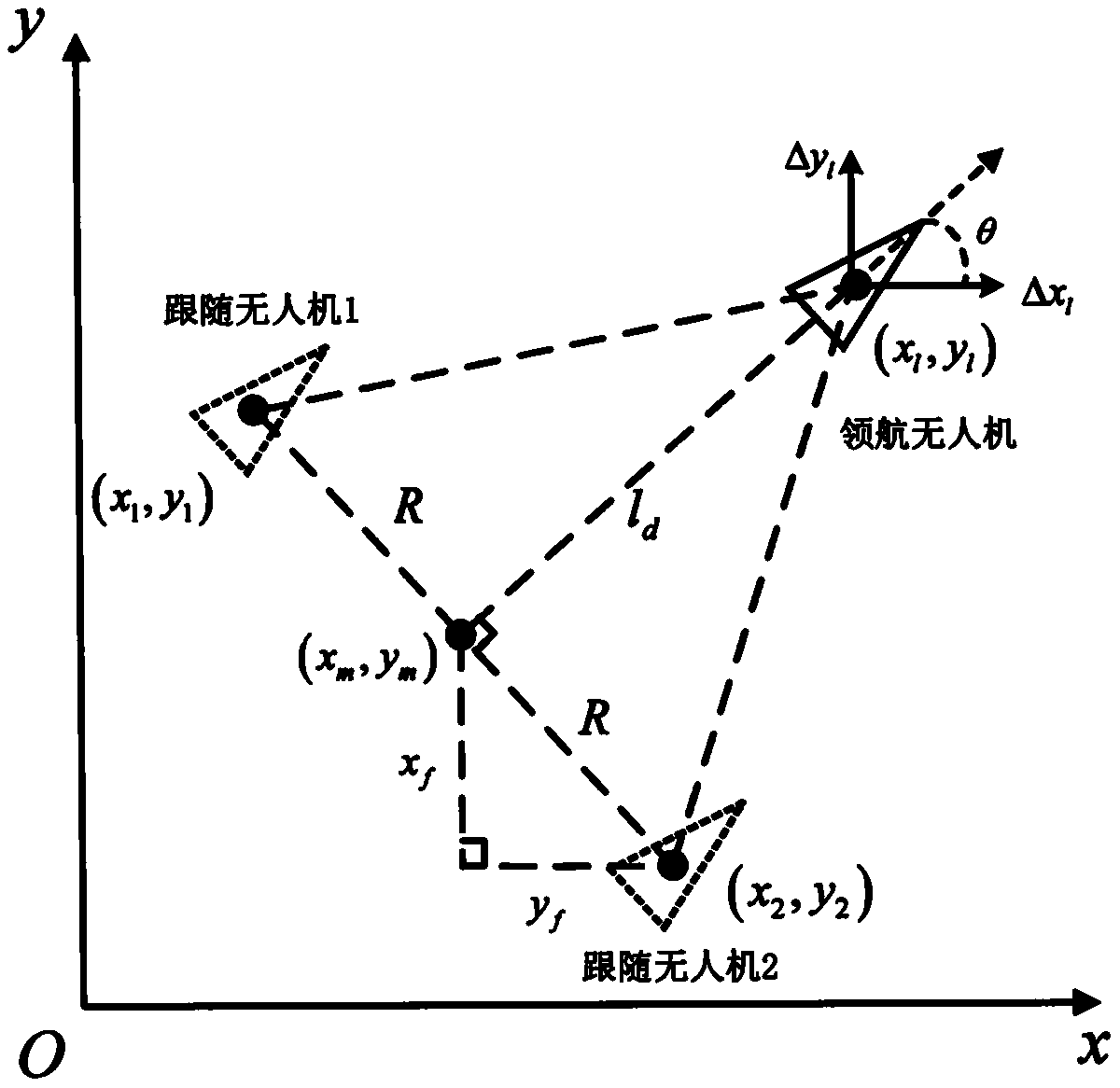
[0031] Step 1. Establish the xoy two-dimensional plane coordinate system. Assume that the performance parameters of each drone are the same, and the parameters of the particle swarm optimization algorithm are the same. For specific parameters, refer to Table 1. pilot drone a 1 The initial position is (25, 0), the target position is (-28, -6); follow the drone's a 2 and a 3 The initial positions are (26, 0), (27, 0) respectively.
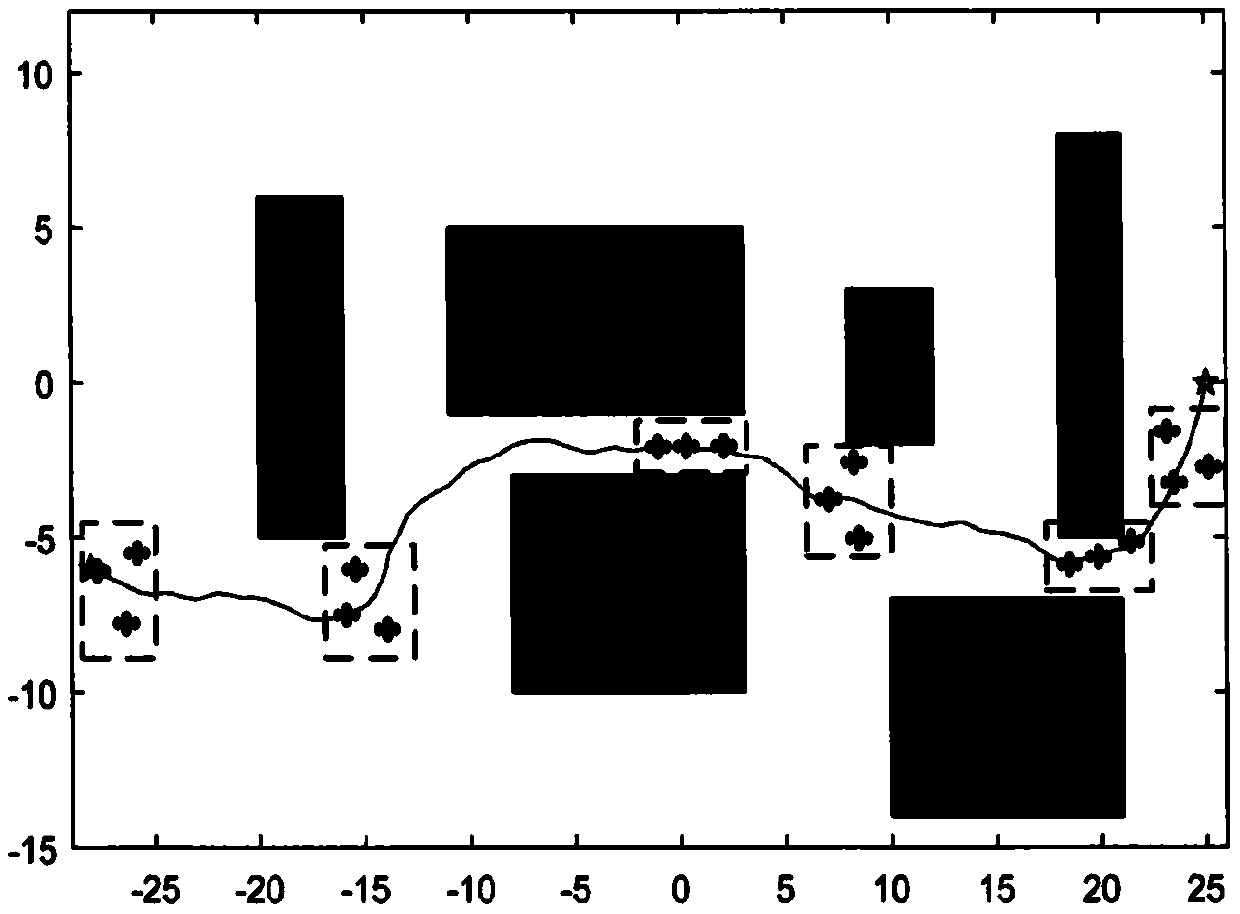
[0032] Step 2. According to the environment, mission and UAV-related constraints, the Dijkstra algorithm is used to initially calculate the global cost of the pilot UAV, and then the trajectory planning problem is transformed into a rolling time domain by using model predictive control. The optimization problem is solved by the fast particle swarm optimization algorithm to obtain the next m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More