

Calibration algorithm for wheel encoder for four-wheel mobile robot
A mobile robot, encoder technology, applied in the direction of instruments, measuring devices, etc., can solve problems such as affecting the navigation performance of the robot and reducing the positioning accuracy of the mobile robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings.
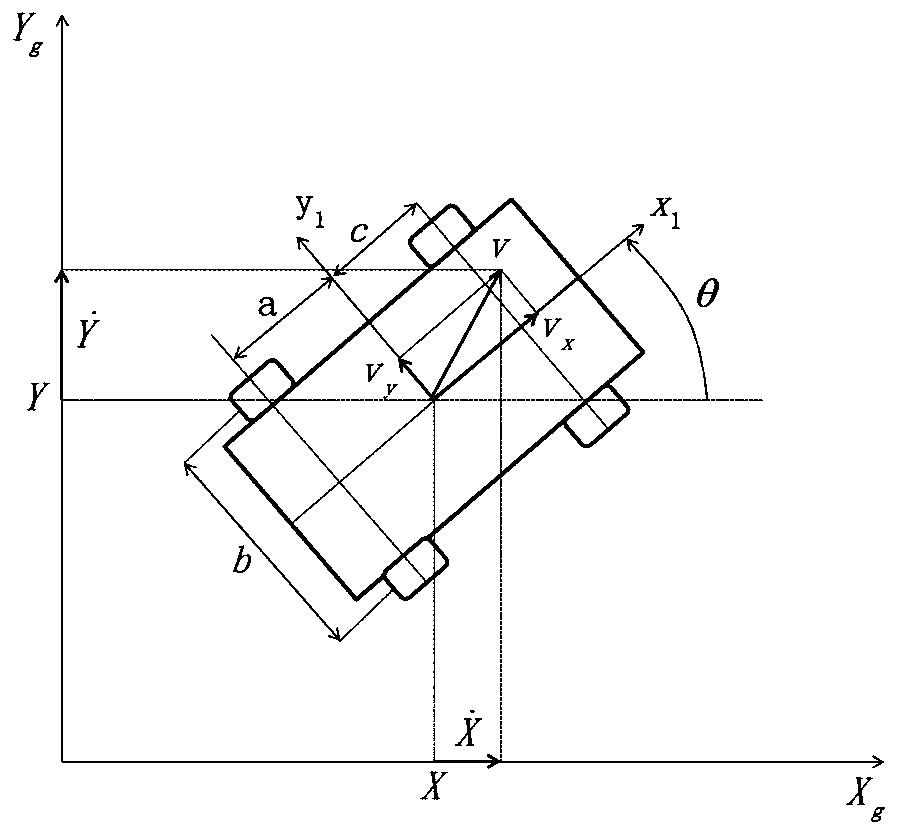
[0055] First, the motion model of the four-wheeled mobile robot is established:
[0056] Such as figure 1 As shown, assuming that the robot moves on a plane, the effective radius of each wheel on the left is r L , the radius of each wheel on the right is r R , ω L and ω R are the rotational speeds of the left and right wheels, respectively. Then an approximate relationship between the wheel speed and the robot speed can be obtained:
[0057]
[0058] Among them, J is a function about the relevant parameters of the mobile robot body:
[0059]
[0060] where b is the wheel base.
[0061] From the above series of equations, it can be clearly seen that theoretically, the speed v of the trolley body x and ω can be transformed into the trolley wheel speed ω through the relevant parameter matrix L and ω R . So far, the motion model modeling of the four-wheele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More