

Double-gantry surgical robot used for joint replacement based on bone surface coordinate mapping
A surgical robot and coordinate mapping technology, which is applied in the field of double-gantry surgical robots, can solve problems such as poor maneuverability, fear of patients, and low precision, and achieve the effect of improving precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
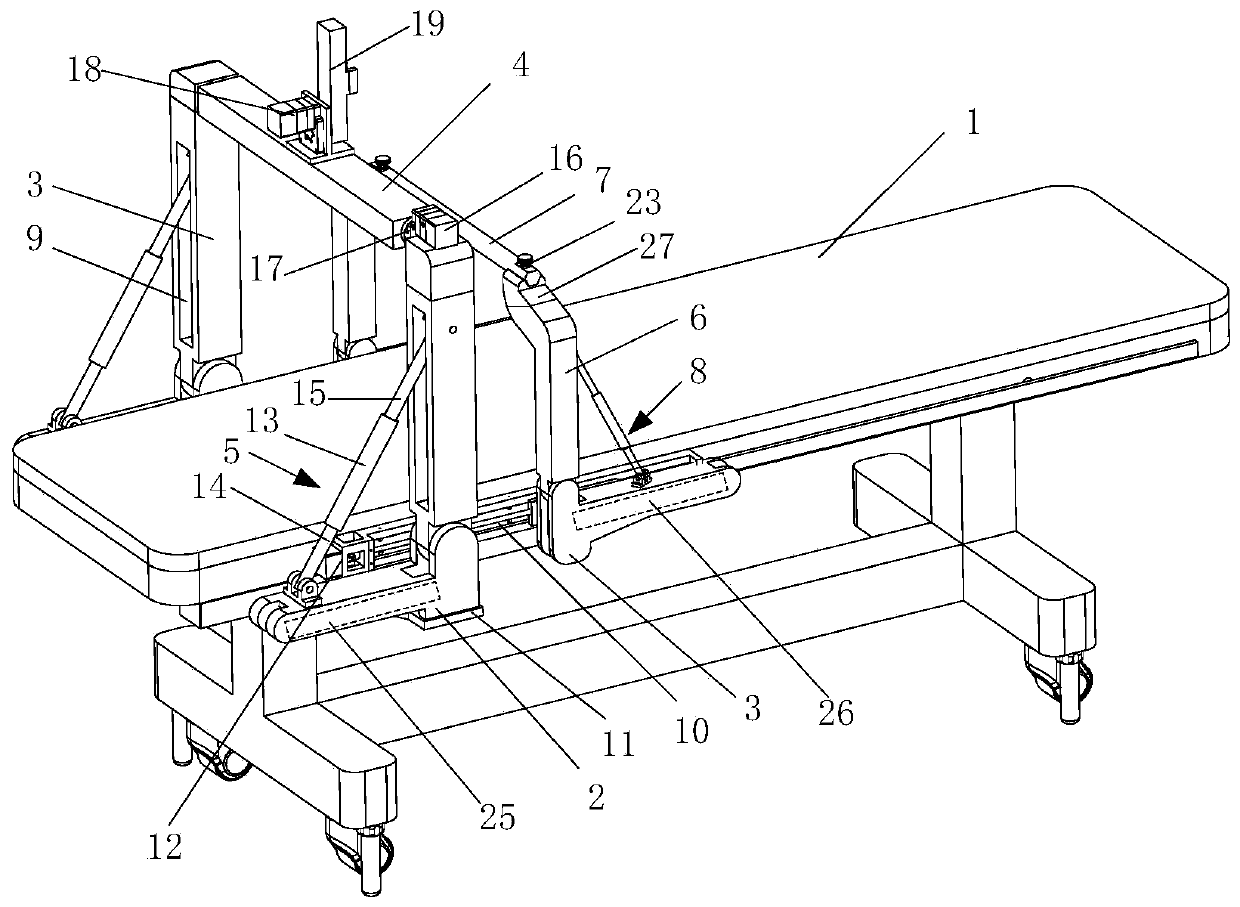
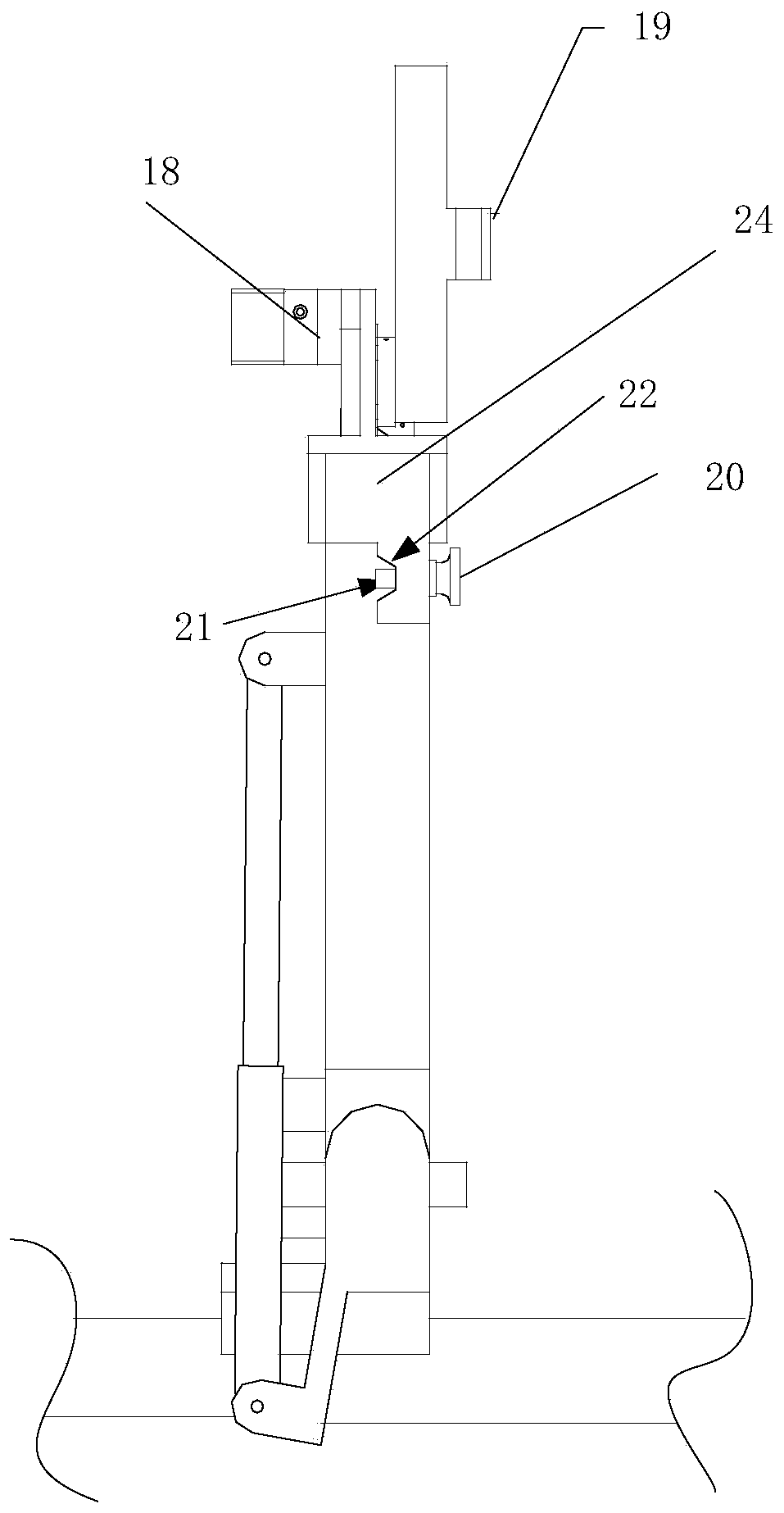
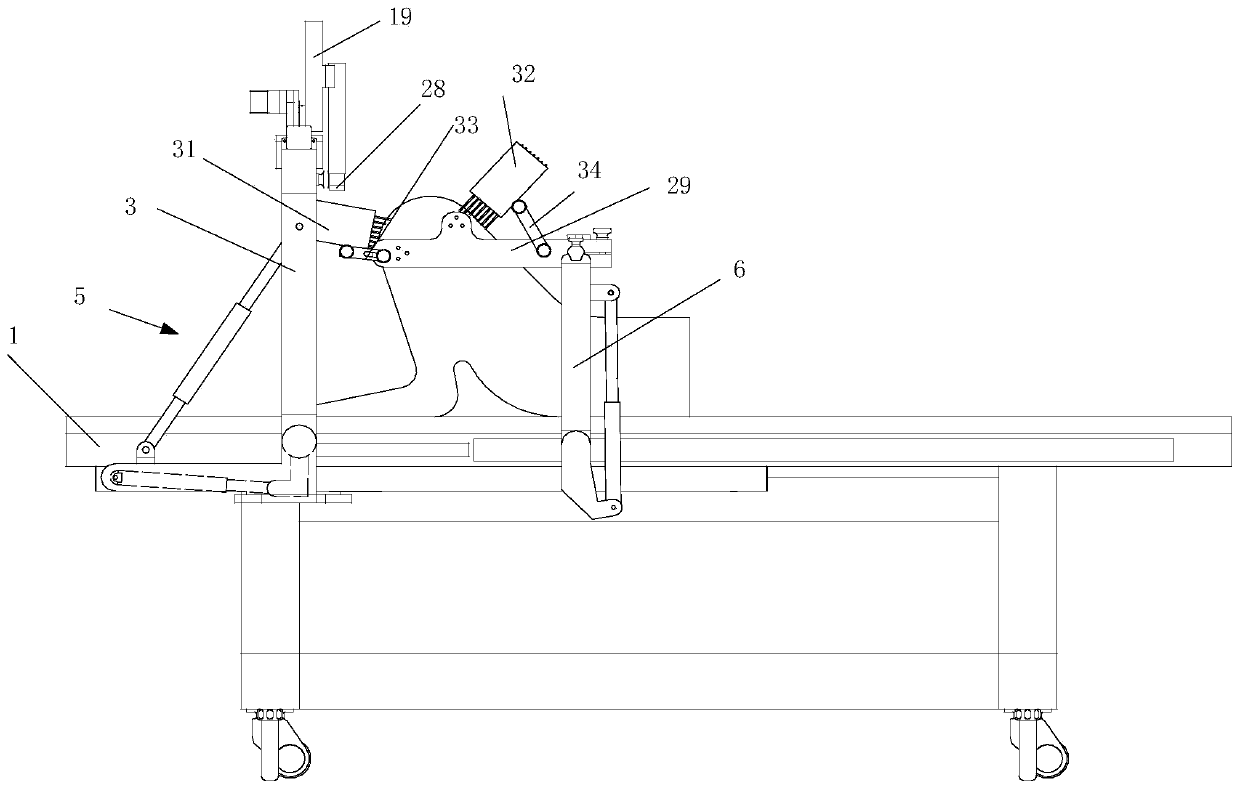
[0047] Such as Figures 1 to 5The double gantry surgical robot used for bone surface coordinate mapping acquisition for joint replacement, including the operating table 1, is different in that: in order to realize the X-direction movement adjustment of the surgical instruments installed subsequently, two parts of the operating table 1 The sides are provided with X-direction guide control devices in pairs. Simultaneously, the main swing arm 3 is installed on the X-direction guiding control device through the main connecting seat 2, and the main push rod 25 is also installed on the main connecting seat 2. The main push rod 25 is connected with the lower end of the main swi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More