

Method for identifying cylindrical surface from multi-line laser radar point cloud data
A point cloud data and multi-line laser technology, applied in the field of environmental perception, can solve problems such as fitting few researches
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0059] The following are preferred embodiments of the present invention and the technical solutions of the present invention are further described in conjunction with the accompanying drawings, but the present invention is not limited to the embodiments.
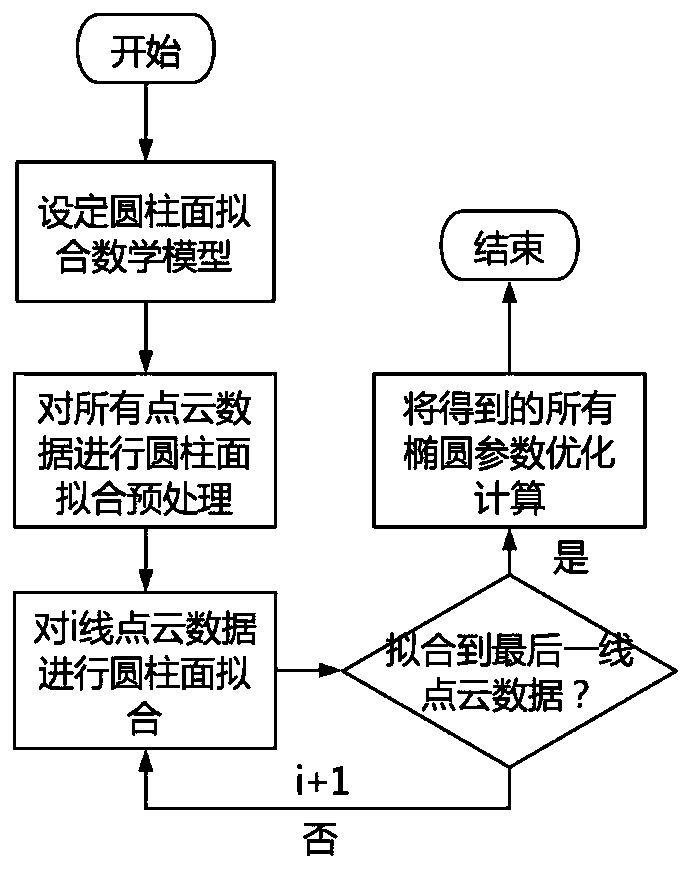
[0060] Such as figure 1 As shown, the method for identifying a cylindrical surface from multi-line lidar point cloud data of the present invention comprises the following steps:
[0061] Step 1: Set the mathematical model of the cylindrical surface
[0062] From the geometric properties of the cylindrical surface, the distance from a point on the cylindrical surface to its axis is always equal to the radius r 0 ,which is:
[0063]
[0064] where P(x,y,z) T is any point on the cylindrical surface, P 0 (x 0 ,y 0 ,z 0 ) T is a point on the cylinder axis, L(a,b,c) T is the unit vector of the cylinder axis, r 0 is the radius of the base circle of the cylinder. A point on the cylinder axis (x 0 ,y 0 ,z 0 ) T , cy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More