

Intelligent integrated service robot for 4S shop and system thereof
A comprehensive service and robot technology, applied in the field of service robots, can solve problems such as increased distrust of sales staff, uneven quality of sales consultants, inaccurate customer flow information, etc., to avoid distrust problems and improve the quality of 4S stores , Guarantee the effect of service quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
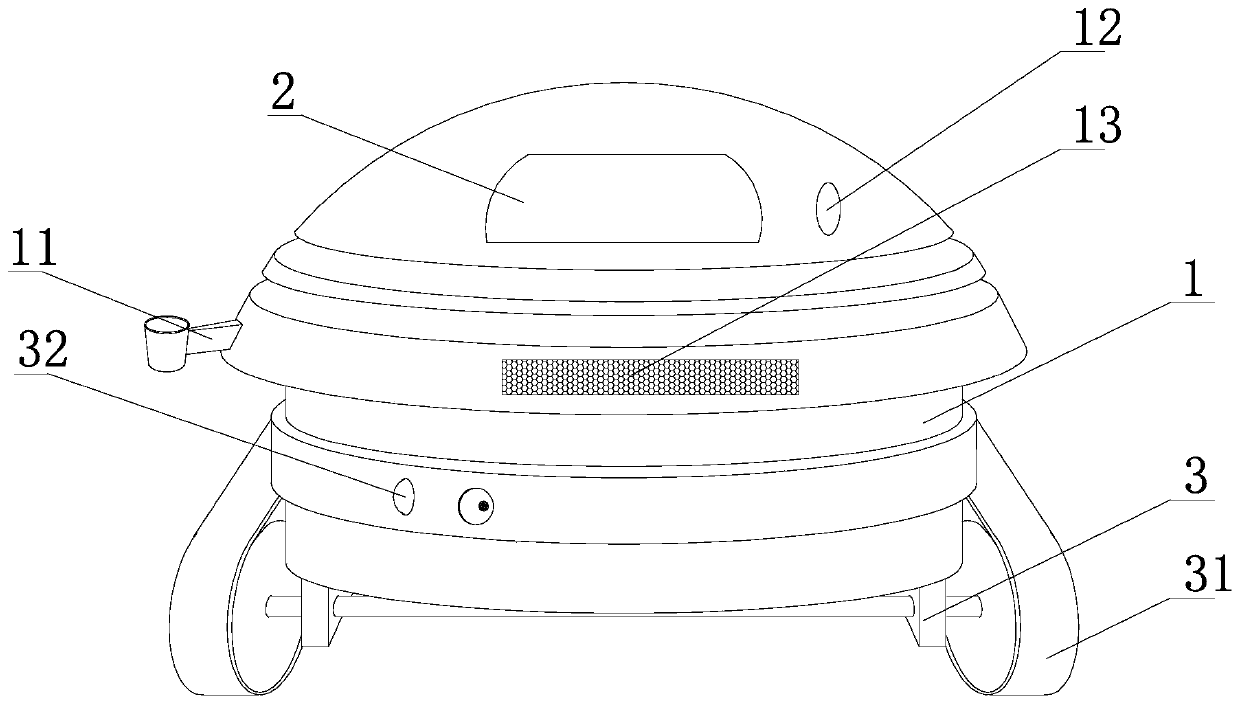
[0039] see figure 1 , an intelligent comprehensive service robot for a 4S store, comprising a housing 1, a running frame 3 fixed at the bottom of the housing 1 and a display screen 2, mechanical arms 11 for serving tea are installed on both sides of the top of the housing 1, and distributed in The induction mechanism 12 and the voice mechanism 13 in the middle of the housing 1 , the movement mechanism 31 for moving, and the vision and laser perception mechanism 32 are installed on the running frame 3 .
[0040] The sensing mechanism 12 and the voice mechanism 13 are connected to the central control mainboard inside the housing 1 through wires, and transmit images, ultrasonic positioning data, and infrared data to the central control mainboard, providing operating system support for the software system and easy access to sensor data.
[0041] The visual and laser perception mechanism 32 and the motion mechanism 31 are connected to the main control board inside the casing 1 thro...
Embodiment 2
[0056] The motor control drive is running in the system, and the robot can perform a series of basic movements such as going straight, turning, and retreating according to the instructions, which is the basis for realizing more complex autonomous movements.
[0057] Driven by lidar, it can read the point cloud data of the lidar sensor in real time, and the map of obstacles in the point cloud data environment is very accurate, providing data support for creating a map of the environment.
[0058] The navigation node mainly implements the basic navigation algorithm, which can control the robot's action according to the given starting point and the planned path, and provides the basic service interface of navigation for the realization of the business logic of the upper layer.
[0059] The path planning node mainly realizes the basic function of static path planning. Given the map and starting point of the environment, it can correctly plan a feasible route.
Embodiment 3
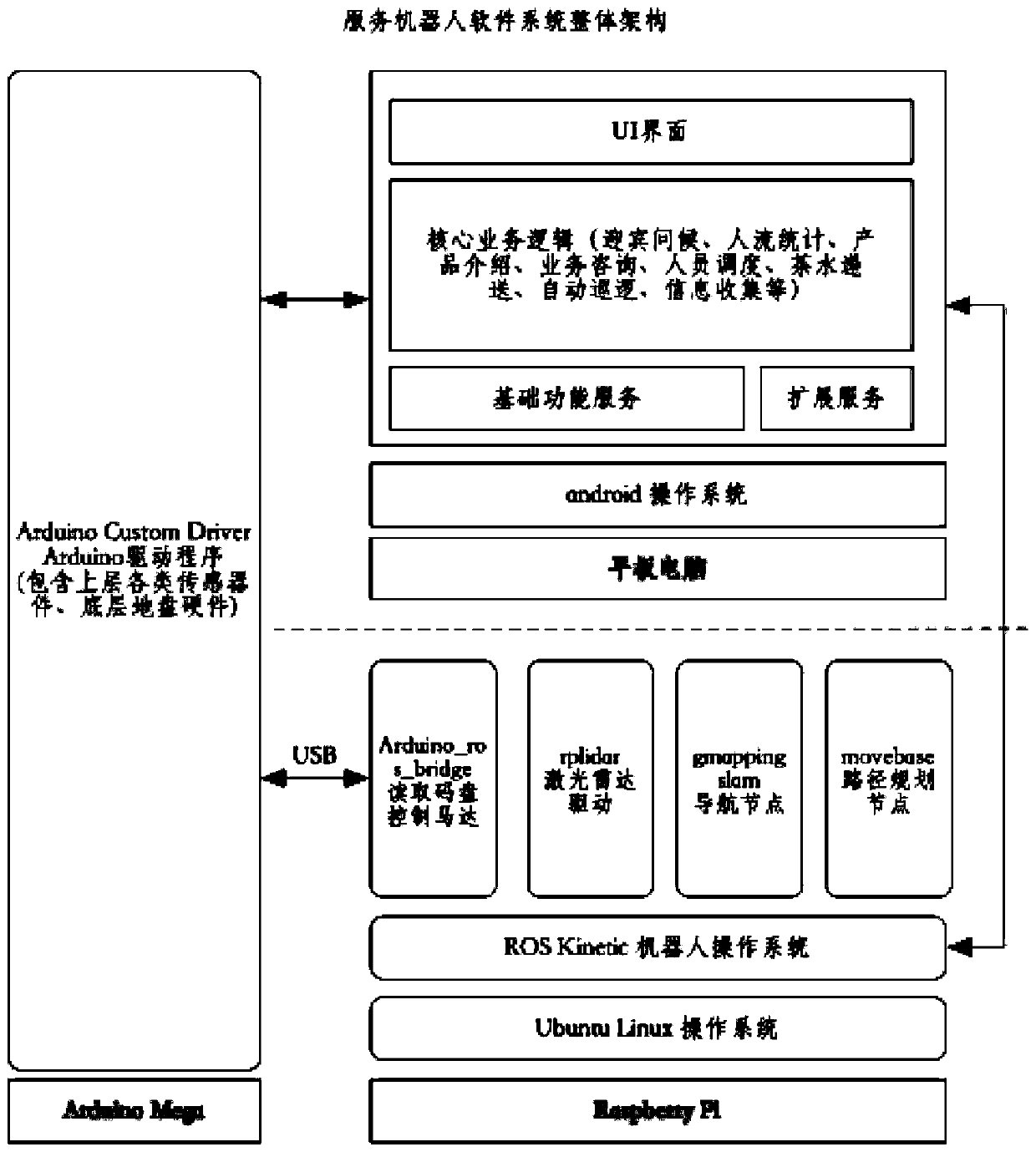
[0061] see Figure 5 , the basic functional design of the software system, mainly includes four modules: autonomous motion module, voice interaction module, customer detection module, and multi-machine collaborative control module. , providing four basic motion services of robot autonomous map construction, autonomous obstacle avoidance navigation, fixed control, and state monitoring.
[0062] In autonomous map construction, through data interaction with the chassis, the laser point cloud data of the lidar sensor can be obtained in real time, and the input point cloud data can be used as input to incrementally build the environmental map through the laser SLAM algorithm of gmapping, and can According to the created environment map, simple path planning is carried out. By interacting with the control commands of the chassis, the robot is controlled to move according to the planned path and explore the unfamiliar environment, so as to create a map of the entire environment. Fin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More