

Drill bit position and posture optimizing method for robot drilling
A technology of robots and drills, which is applied to drilling/drilling equipment, parts of boring machines/drilling machines, manipulators, etc., and can solve problems such as installation errors, calibration errors between workpieces and robot coordinate systems, and low absolute precision of robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention proposes a method for optimizing the pose of a drill bit in robot drilling. The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The following examples serve to illustrate the present invention, but do not limit the scope of the present invention.
[0039] The present invention proposes a method for optimizing the drill bit pose in robot drilling, comprising the following steps:
[0040] 1) Build a robot drilling system based on fringe projection method and visual servo control;
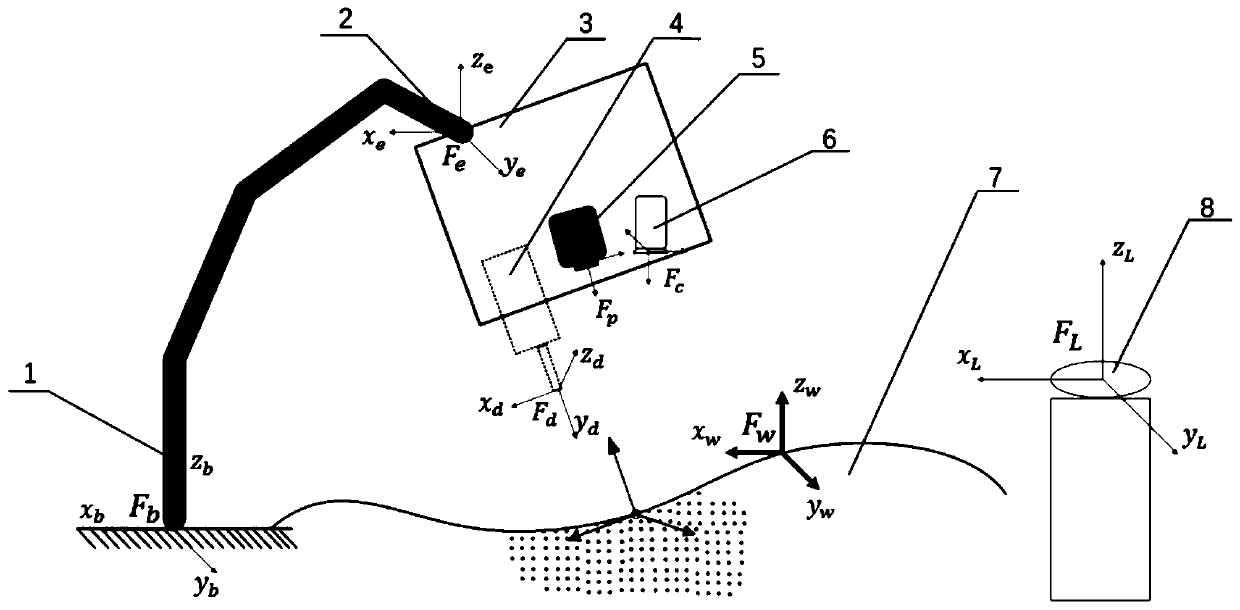
[0041] The structure of the robot drilling system based on fringe projection method and visual servo control in the embodiment of the present invention is as follows: figure 1 As shown, the system includes: a six-degree-of-freedom industrial robot (hereinafter referred to as a robot) base 1, a robot end effector 2, a fixed base 3, a drilling device 4, a projector 5, a camera 6 and a comput...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More