

Material picking robot for auto parts processing and working method thereof
A technology of auto parts and robots, which is applied in the field of picking robots, can solve the problems of easy shaking or sliding, falling dust, time-consuming and labor-intensive problems, and achieves the effects of high degree of automation, easy cleaning of waste, and saving time and effort in use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The technical solutions of the present invention will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
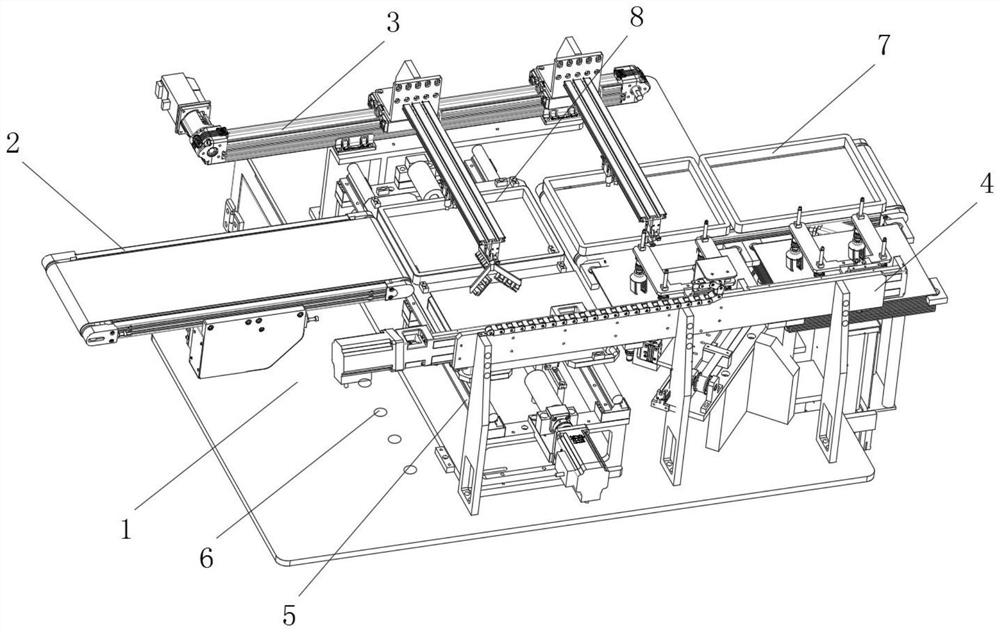
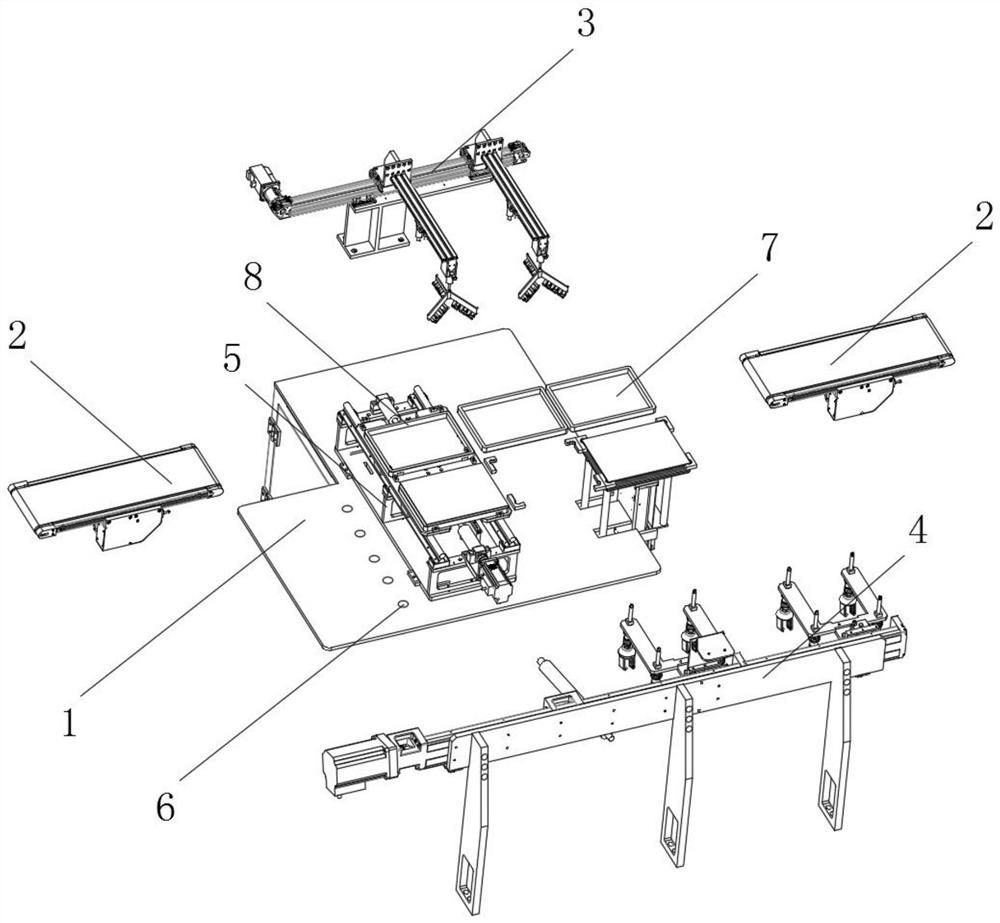
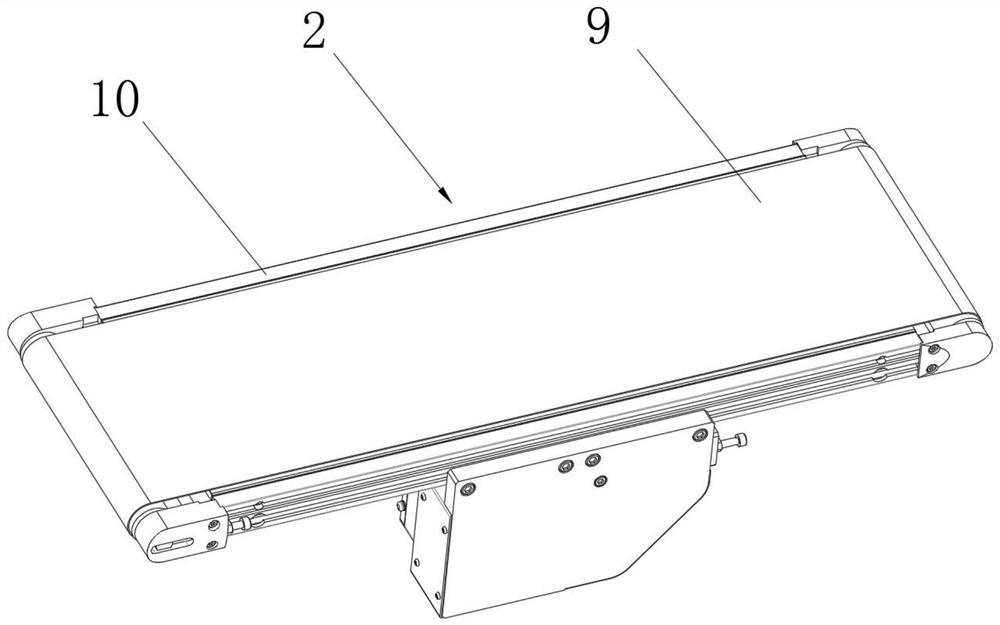
[0048] see Figure 1-13 As shown, a material picking robot for auto parts processing includes a base plate 1, a material picking frame 3, a rear picking platform 4 and a material shifting platform 5. Both ends of the bottom plate 1 are provided with transport frames 2, and the two transport frames 2 is provided with a material transfer table 5, one end of the material transfer table 5 is provided with a material picking frame 3, and the other end of the processing frame 8 is provided with a rear pick table 4;
[0049] Conv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More