

Novel soft mechanical hand capable of realizing vertical plane grabbing
A vertical plane, manipulator technology, used in manipulators, chucks, manufacturing tools, etc., can solve the problems of easy falling off, poor adaptability of irregular items, unstable grasping, etc., and achieve high grasping stability and contact area. Large, not easy to fall off effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
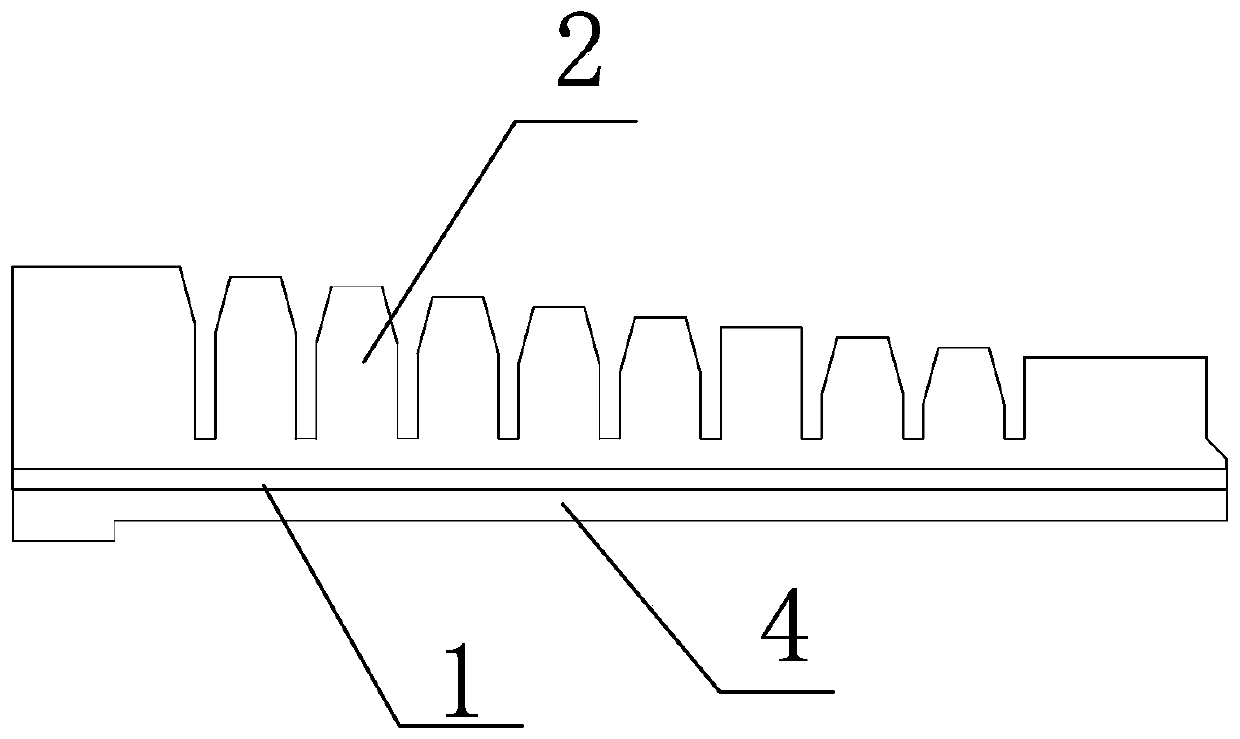
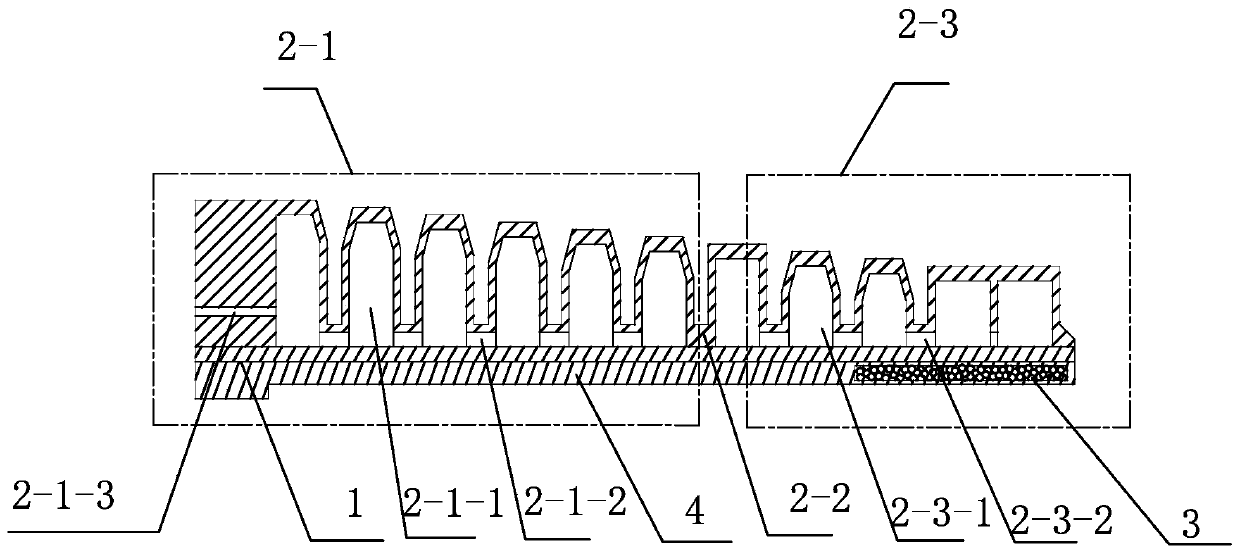
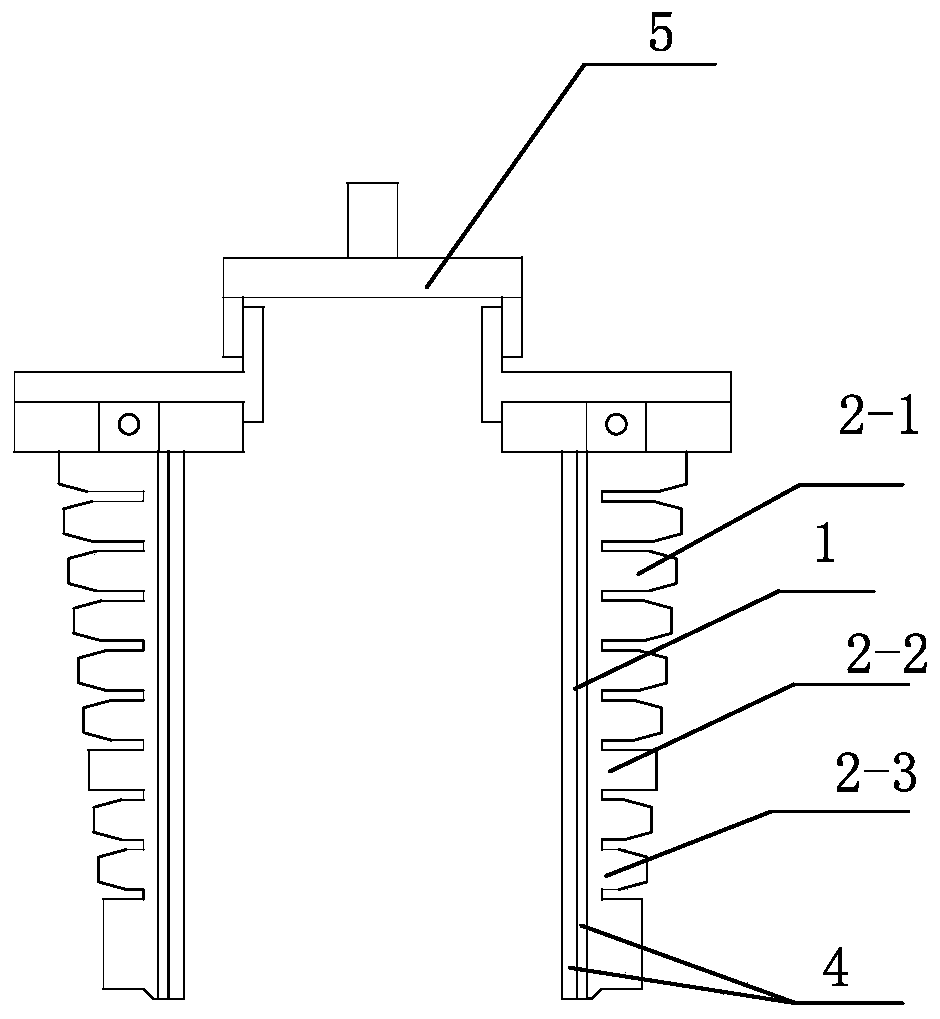
[0030] The structural representation of the software actuator of the present invention is as follows: Figure 1-Figure 2 As shown, it includes a constrained layer 1 and a base 2 located on one side of the constrained layer 1, the base 2 includes a pneumatic bending module 2-1 and a grasping module 2-3, and the grasping module 2-3 is an air mesh type structure, when grabbing an item, the pneumatic bending module 2-1 is inflated, the grabbing module 2-3 is not inflated, and the pneumatic bending module 2-1 drives the grabbing module 2-3 to realize the vertical plane grab action. The base body 2 is a soft material, such as silicon rubber material.
[0031] In this embodiment, the pneumatic bending module 2-1 is connected to the grasping module 2-3 through a soft connection joint 2-2, wherein the soft connection joint 2-2 is used for connection...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More