

Robot relocation method based on landmark information and multi-sensor data fusion
A multi-sensor, data fusion technology, applied in two-dimensional position/channel control, instruments, motor vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
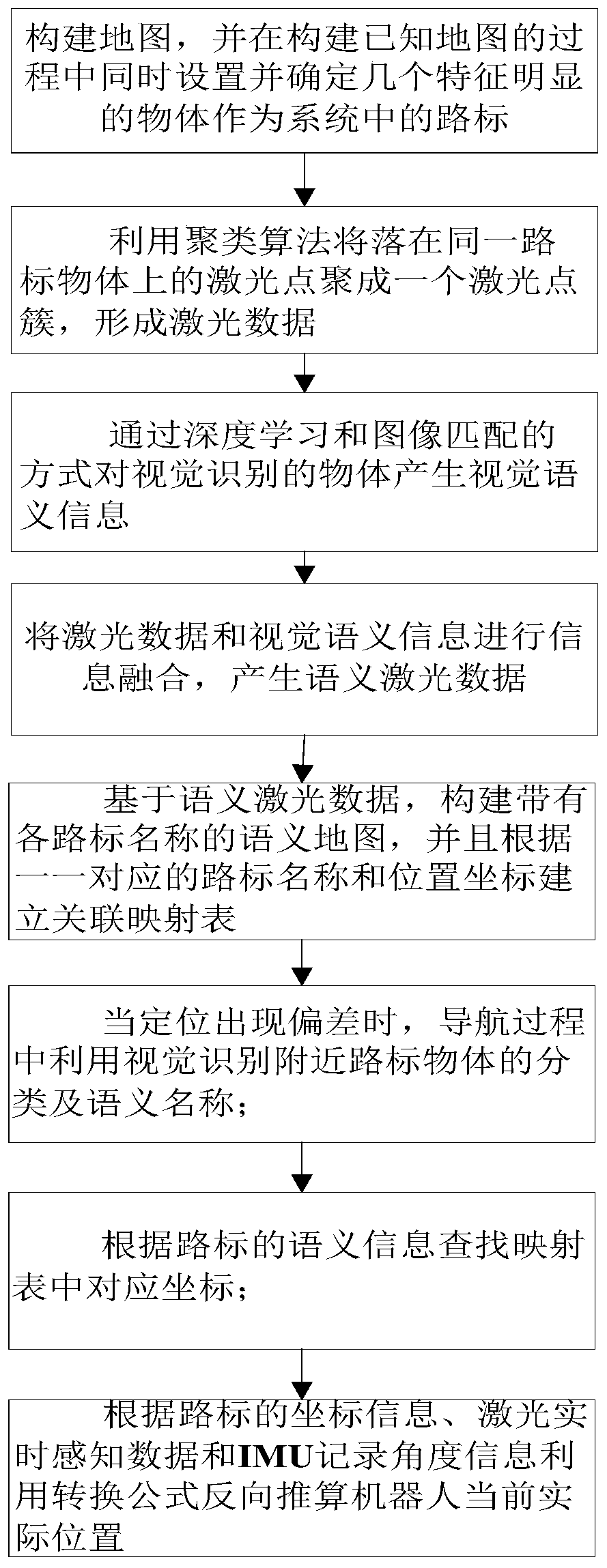
[0064] Such as figure 1 , figure 2 , image 3 As shown, the robot relocation method based on landmark information and multi-sensor data fusion includes the following steps:
[0065] Step S1: Construct a map, and simultaneously set and determine several objects with distinctive features as landmarks in the system during the process of constructing a known map. The selection of landmark objects and the determination of the position of landmark objects in the current environment must comply with the requirements of this method The basic principle;
[0066] Step S2: Use a clustering algorithm to gather the laser points falling on the same landmark object into a laser point cluster to form laser data;
[0067] Step S3: generating visual semantic information for visually recognized objects through deep learning and image matching;
[0068] Step S4: Use calibration parameters and geometric models to fuse laser data and visual semantic information to generate semantic laser data,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More