

Robot path planning method based on self-adaptive genetic algorithm
A genetic algorithm and path planning technology, applied in the field of robotics, can solve problems such as poor optimization effect and large limitations, and achieve the effect of outstanding optimization effect and improved algorithm performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
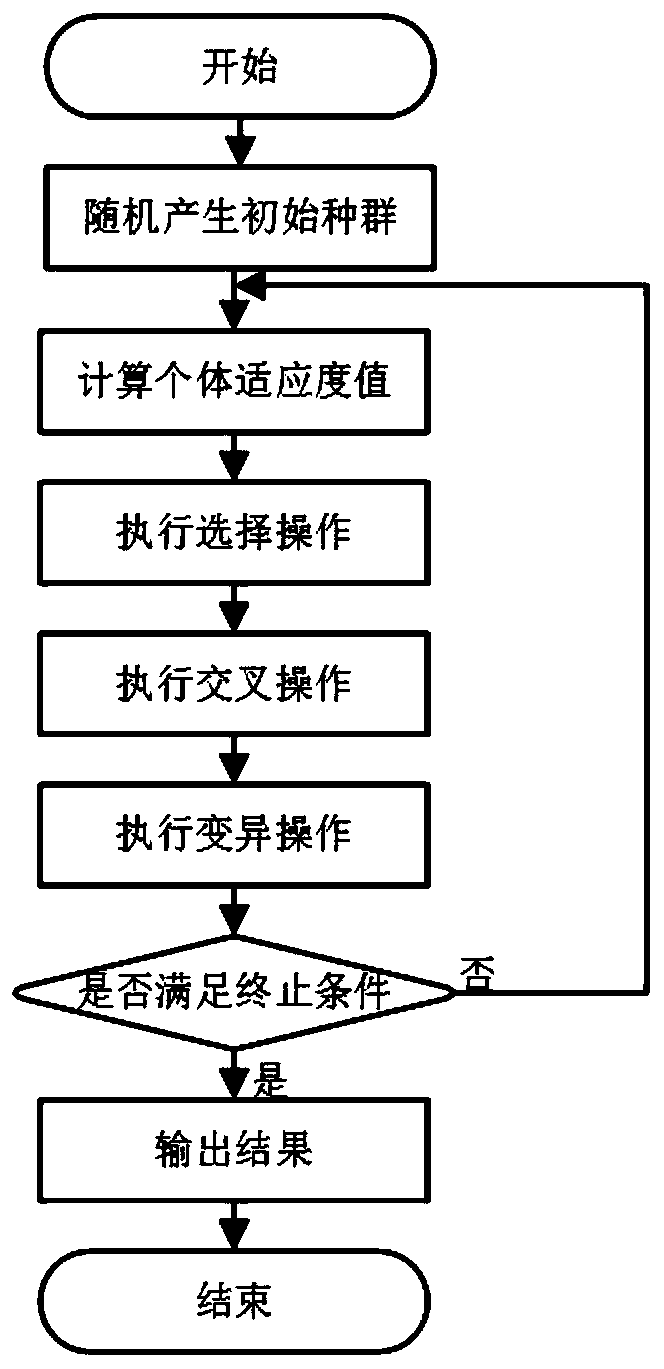
[0039] Such as figure 1 As shown, a robot path planning method based on adaptive genetic algorithm includes the following steps:
[0040] (1) Select an appropriate coding method, and randomly generate several individuals to form the initial group;
[0041] (2) Set the fitness function and calculate the fitness value of each individual in the current population;
[0042] (3) Select regenerated individuals according to their fitness value. Individuals with high fitness have a high probability of being selected to participate in evolution, and individuals with low fitness are easy to be eliminated;
[0043] (4) Generate new individuals according to a certain crossover method and crossover probability;
[0044] (5) Generate new individuals according to a certain mutation method and mutation probability;
[0045] (6) Generate a new generation of population by selection, crossover and mutation operations, judge whether the termination condition is met, if yes, output the optimal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More