Elastic soft robot kinematical modeling method based on constant curvature assumption
A technology of robot kinematics and elastic soft body, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inverse kinematics is difficult to calculate, change, and does not point out the relationship between elastic soft robots, etc., and achieves convenient, fast and convenient modeling The effect of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
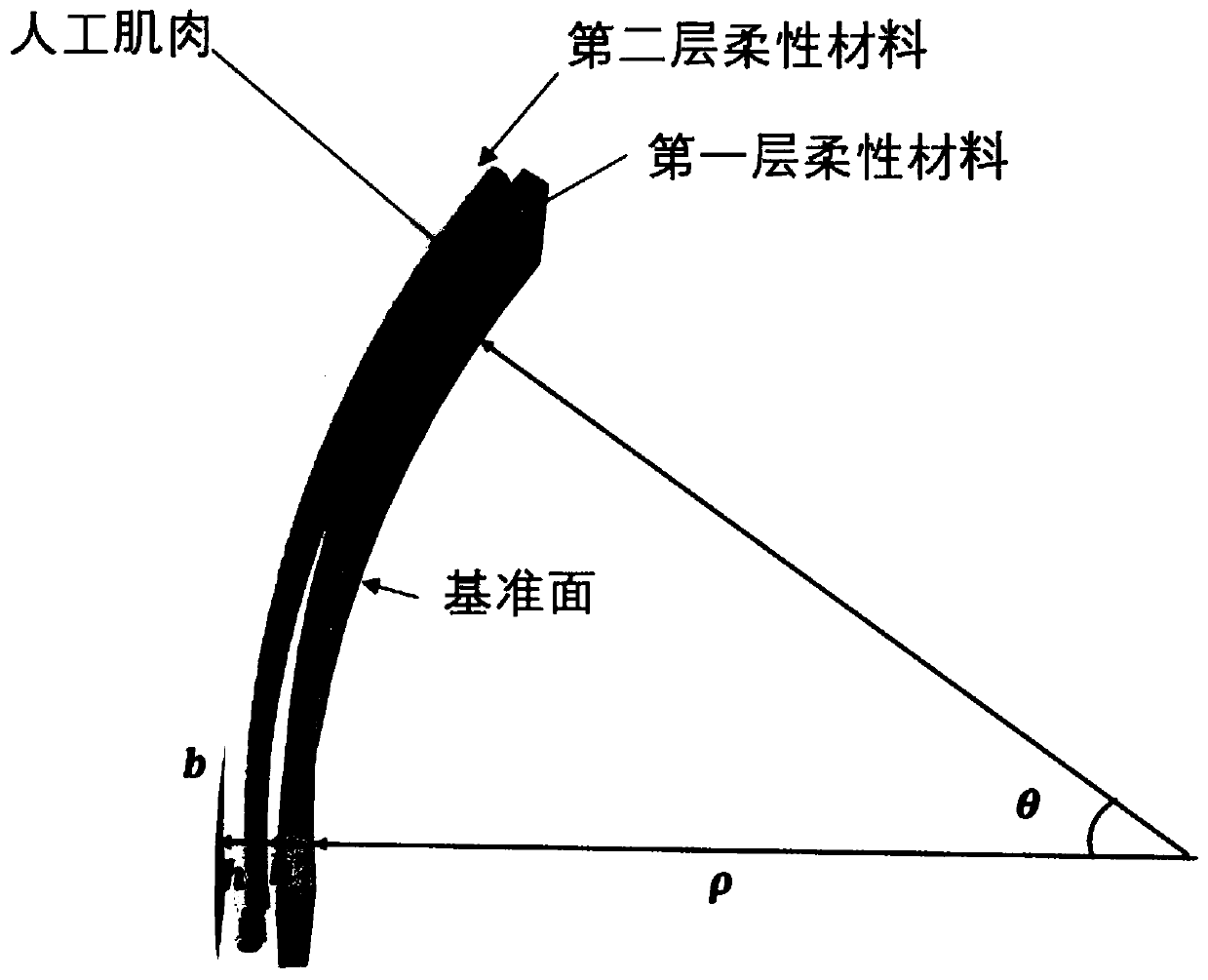
[0042] The present invention proposes a kinematics modeling method for an elastic soft robot based on the assumption of constant curvature, which will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0043] The present invention proposes a method for modeling the kinematics of an elastic soft robot based on the assumption of constant curvature. The method includes the following steps:
[0044] (1) Obtain the material parameters of the artificial muscle implanted in the flexible material of the elastic soft robot by consulting literature, experiments, etc., including: equivalent stiffness of the artificial muscle, original length data, thermal expansion coefficient, etc., and establish the corresponding parameters of the artificial muscle Force, displacement, and control equations;
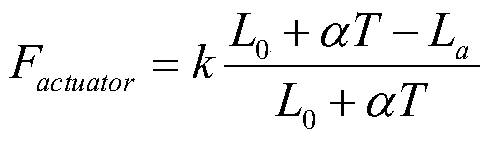
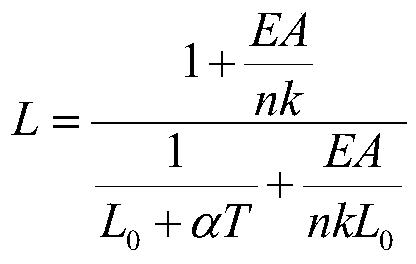
[0045] Taking the twisted and curled polymer artificial muscle as an example, the force, displacement, and control equations are:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More