

Vehicle-mounted Lidar steel rail point cloud extraction method based on generalized neighborhood height difference
An extraction method and neighborhood technology, applied in image analysis, image enhancement, instruments, etc., can solve problems such as low degree of automation, inability to extract continuous rail point clouds across the board, and low extraction accuracy of rail point clouds.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044]The present invention will be described in further detail below in conjunction with the accompanying drawings and specific implementation methods.
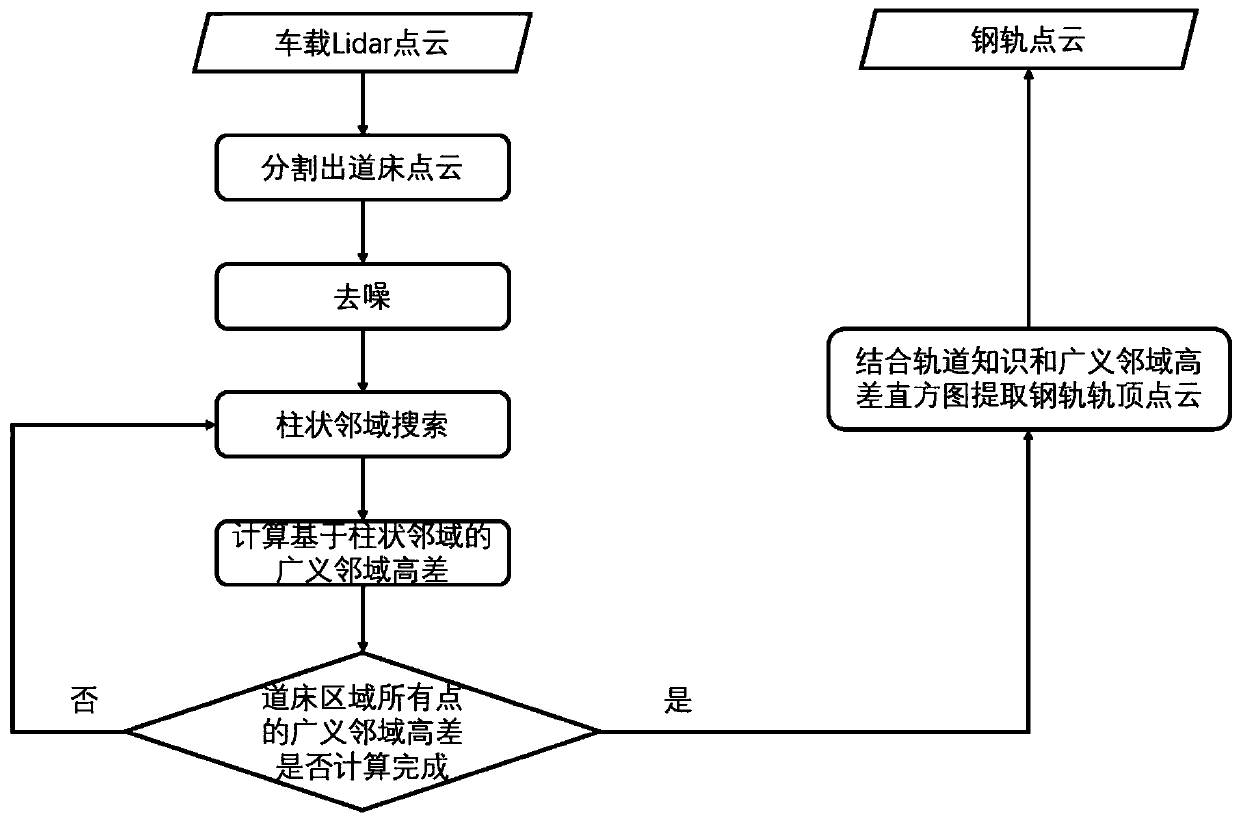
[0045] A method for extracting rail point cloud of vehicle-mounted Lidar rail based on generalized neighborhood height difference proposed by the present invention, the flow chart is as follows figure 1 As shown, the specific steps are:
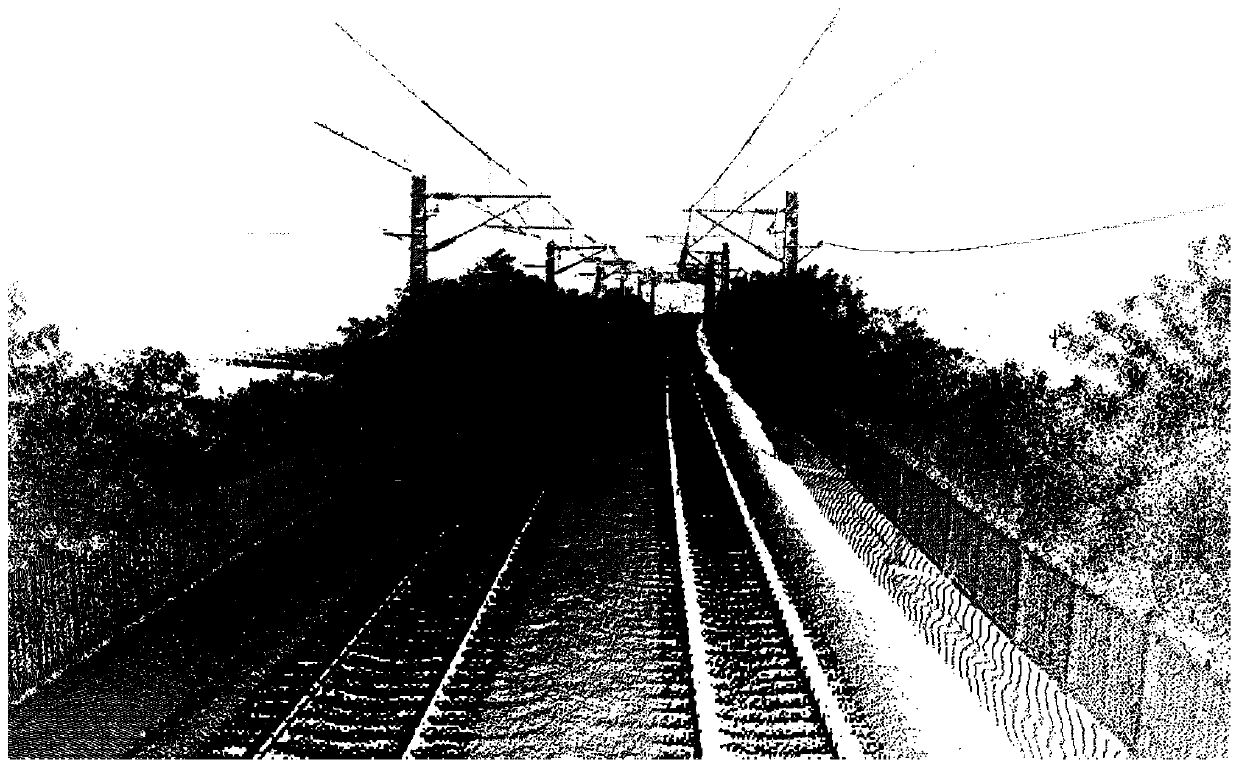
[0046] Step 1: Segment the point cloud of the ballast bed according to the scanning angle or trajectory line of the vehicle Lidar point cloud, the result is as follows figure 2 As shown (the situation including the fork is as follows image 3 shown).
[0047] Step 2: Use statistical filtering and other algorithms to remove noise points in the ballast bed point cloud caused by factors such as rail self-occlusion, and record the ballast bed point cloud after removing noise points as {P m ,m=1,2,3,...}.
[0048] Step 3: Columnar Neighborhood Search :P i Point cloud for the track bed {P ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More