

Driving compensation method for rope-driving continuum robot
A compensation method and continuum technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of small size, poor versatility, and low control accuracy of robots, so as to improve motion control accuracy, reduce technical difficulty and Damage, the effect of improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
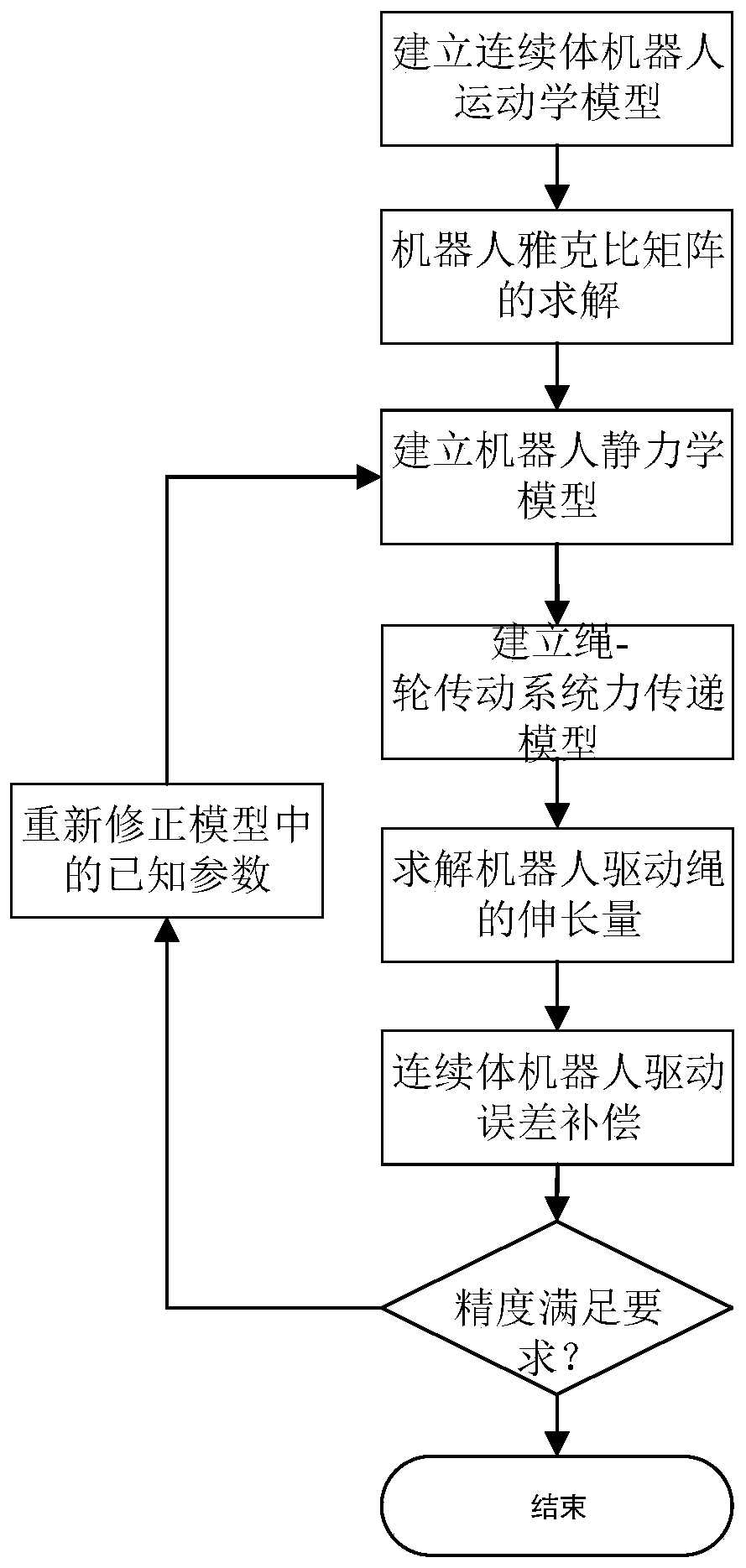
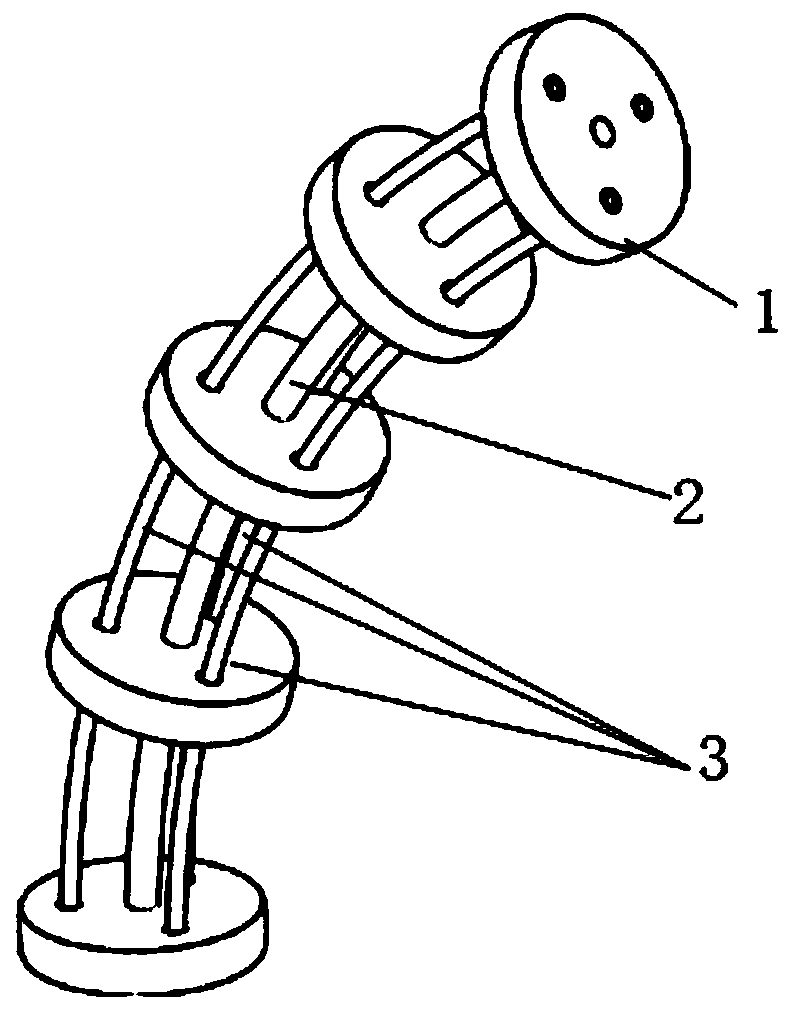
[0056] combined with figure 1 , 2 3. The technical route proposed by the present invention is specifically explained and explained. The application example here is not only applicable to this example, but also applicable to rope-driven continuum robots of various structural types.
[0057] refer to figure 1 , a drive compensation method for a rope-driven continuum robot of the present invention includes the following steps:
[0058] (1) Establish the kinematics model of the continuum robot
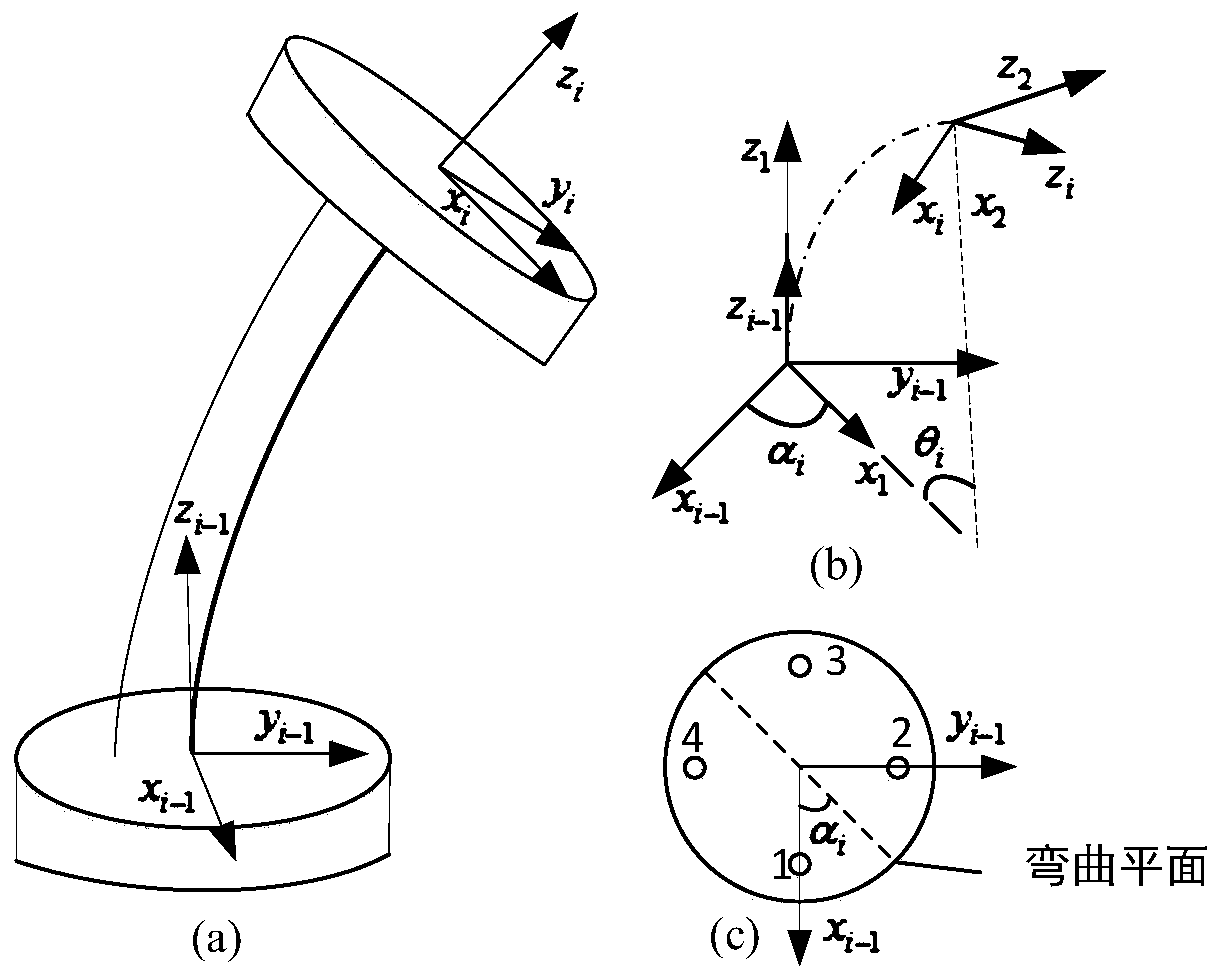
[0059] The kinematics model of the continuum robot mainly includes two parts, one is to establish the mapping relationship between the drive space and the joint space, and the other is the mapping relationship between the joint space and the operation space. The kinematics of the catheter robot can be derived through the superposition between the two. Model. The single-section bending element structure such as figure 2 As shown, the kinematic model of the continuum robot is establish...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More