

Full-automatic hand-eye calibration and working plane calibration method and device
A working plane, hand-eye calibration technology, applied in the field of robot calibration, can solve the problems of complex calibration process, inability to guarantee accuracy, and inability to provide obstacle avoidance functions, and achieve the effect of improving calibration efficiency, reducing manual intervention, and making clear evaluations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below in conjunction with accompanying drawing, the present invention will be further described as follows:
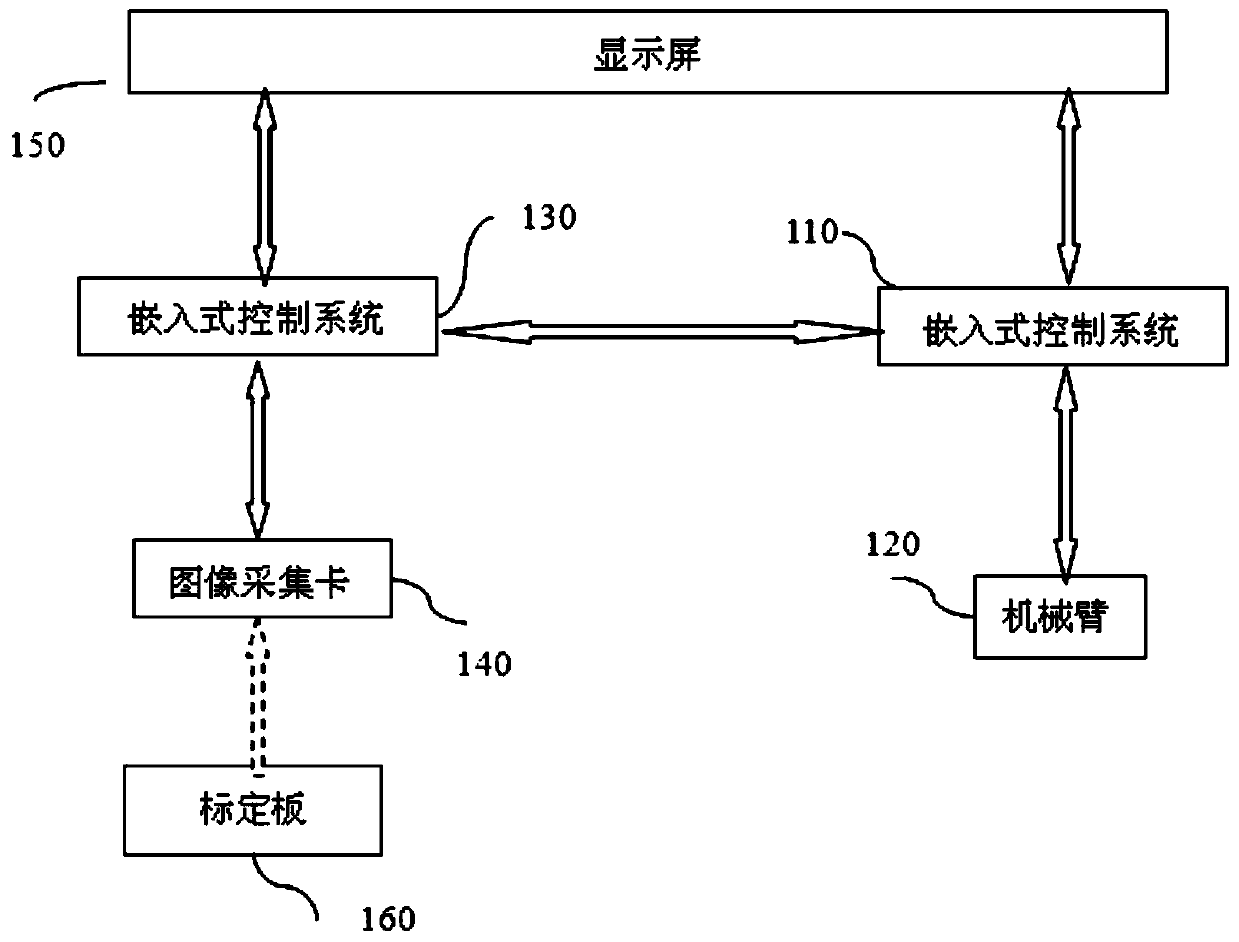
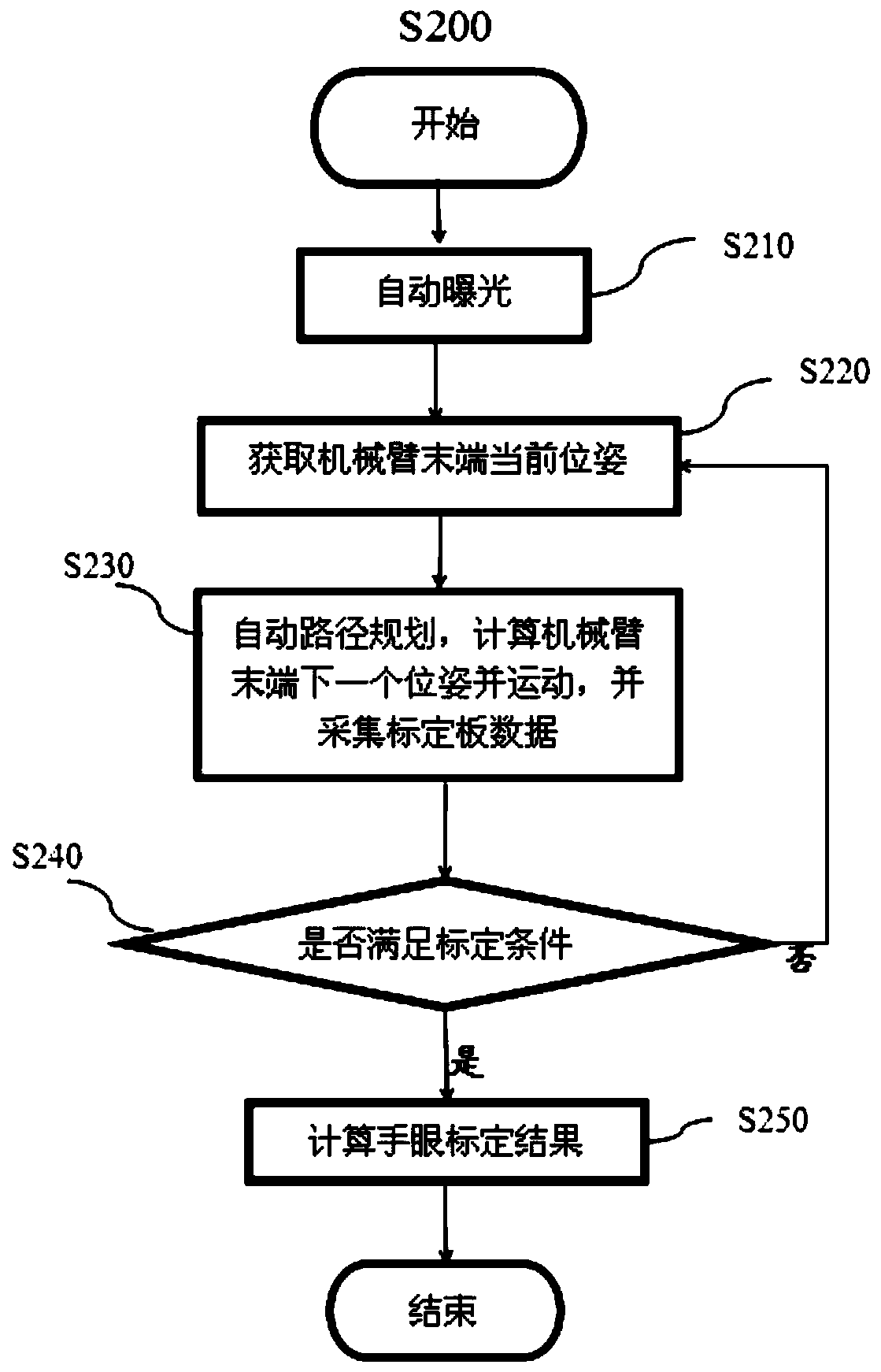
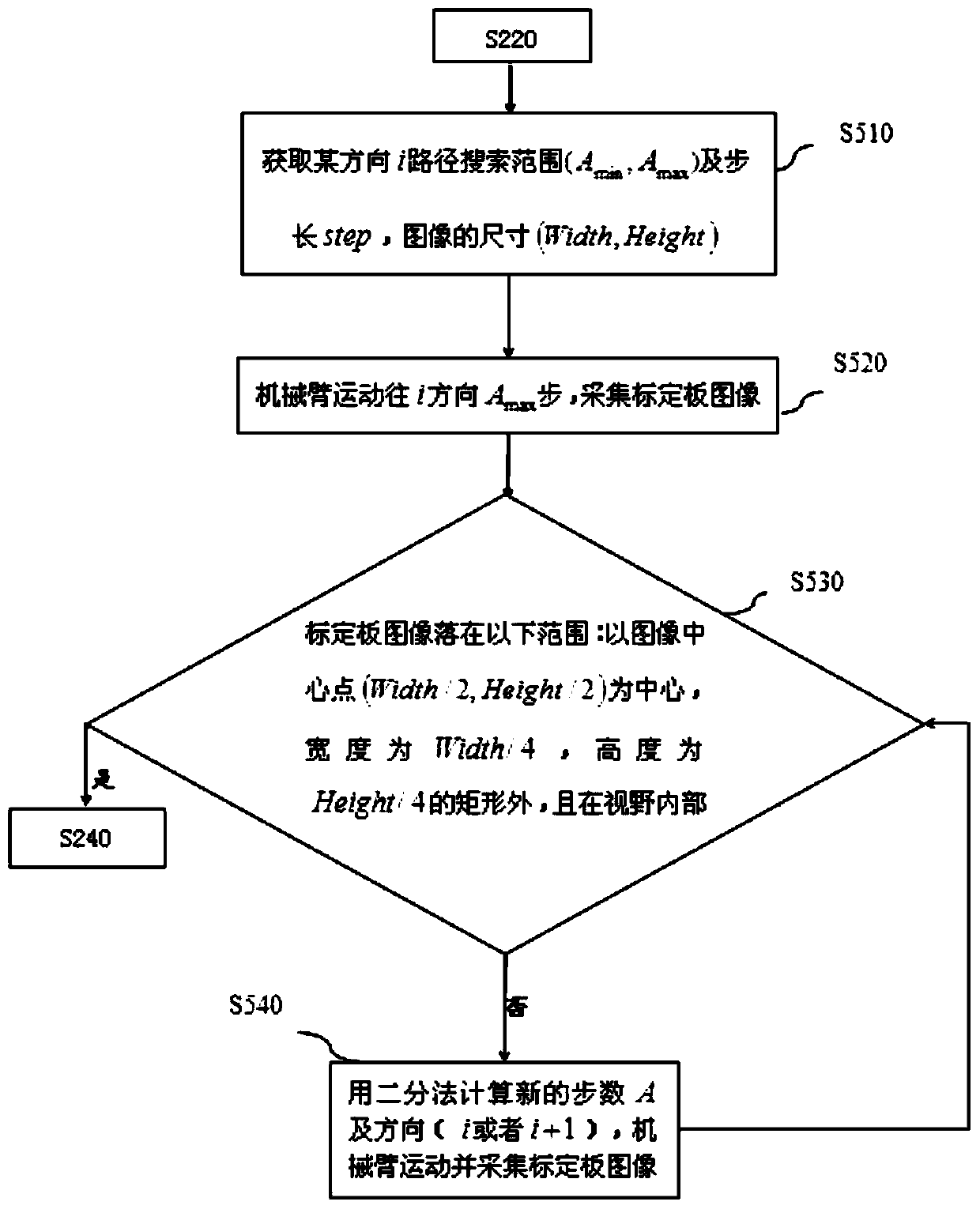
[0029] The invention provides a fully automatic hand-eye calibration and working plane calibration method, comprising the following steps: 1) automatic exposure to ensure that the calibration board can be identified; 2) obtaining the current pose of the end of the mechanical arm and the image data of the calibration board, and The automatic path planning method calculates the next pose of the end of the manipulator; 3) Determine whether there are at least nine calibration board images covering the entire image field of view; 4) If not, continue to collect the pose of the manipulator and the calibration board image; if there are , the hand-eye relationship matrix is calculated according to the pose data of the manipulator and the image data of the calibration board, and the camera internal parameters and the current working plane are calibrated at the same time,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More