

An Electrostatic Actuator for a Robot Joint
A technology of robot joints and actuators, applied in the field of machinery, can solve the problems of increasing the installation space and overall weight of robot equipment, poor load impact resistance, clogging of servo valve spray baffles, etc., to eliminate easy pollution clogging and system heating Small, the effect of improving the sealing reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in conjunction with the accompanying drawings.
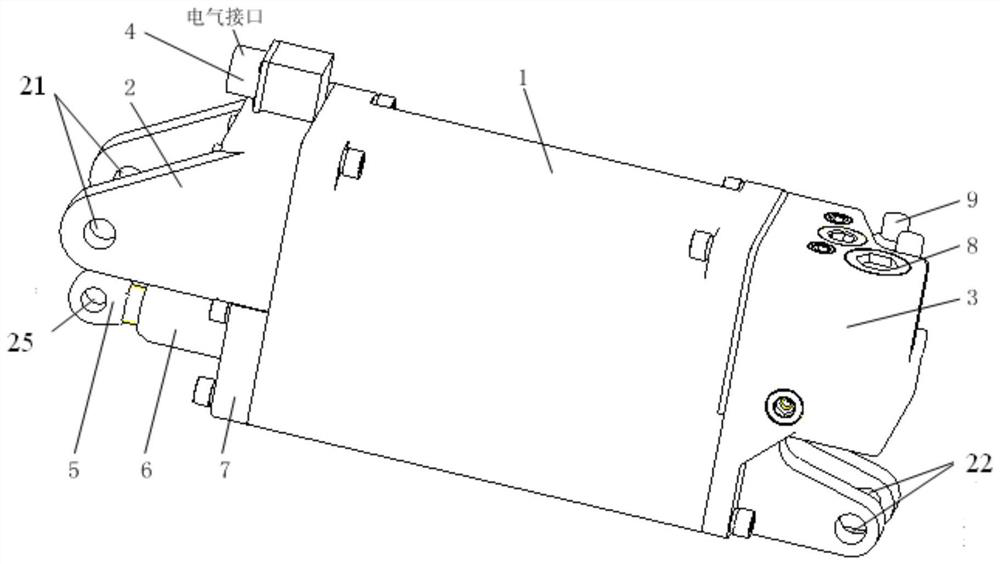
[0026] Such as image 3 , 4 As shown, a high-compact electrostatic actuator 23 for a robot joint includes an integrated housing 1, a knee joint connection block 2, a hip joint connection block 3, a motor pump assembly, an actuator assembly, and hydraulic accessories;
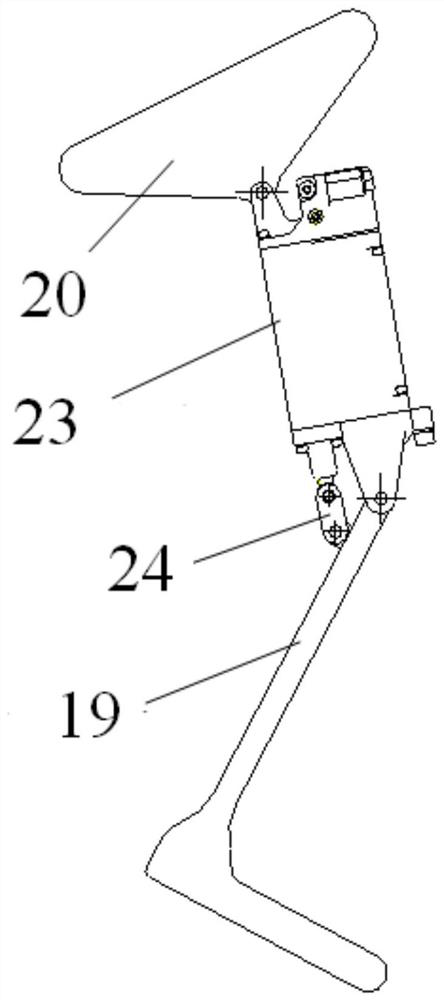
[0027] Such as figure 1 As shown, the knee joint connection block 2 and the hip joint connection block 3 are respectively installed on both ends of the integrated housing 1 by screws. The parts 19 are connected, and the hip joint connection block 3 is provided with a hip joint connection port 22, which is connected with the hip joint part 20 of the robot; the motor pump assembly and the actuator assembly are installed in the integrated housing 1, and the hydraulic accessories are installed in the hip joint. In the joint part connection block 3; the motor pump assembly provides power for the movement of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More