

Cabin assembling and docking platform for autonomous underwater vehicle
An underwater vehicle and docking platform technology, applied in metal processing, metal processing equipment, manufacturing tools, etc., can solve the problems of unguaranteed assembly accuracy, uncompact device design, low structural reliability, etc., to save manpower and structure. Simple and stable, high assembly efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
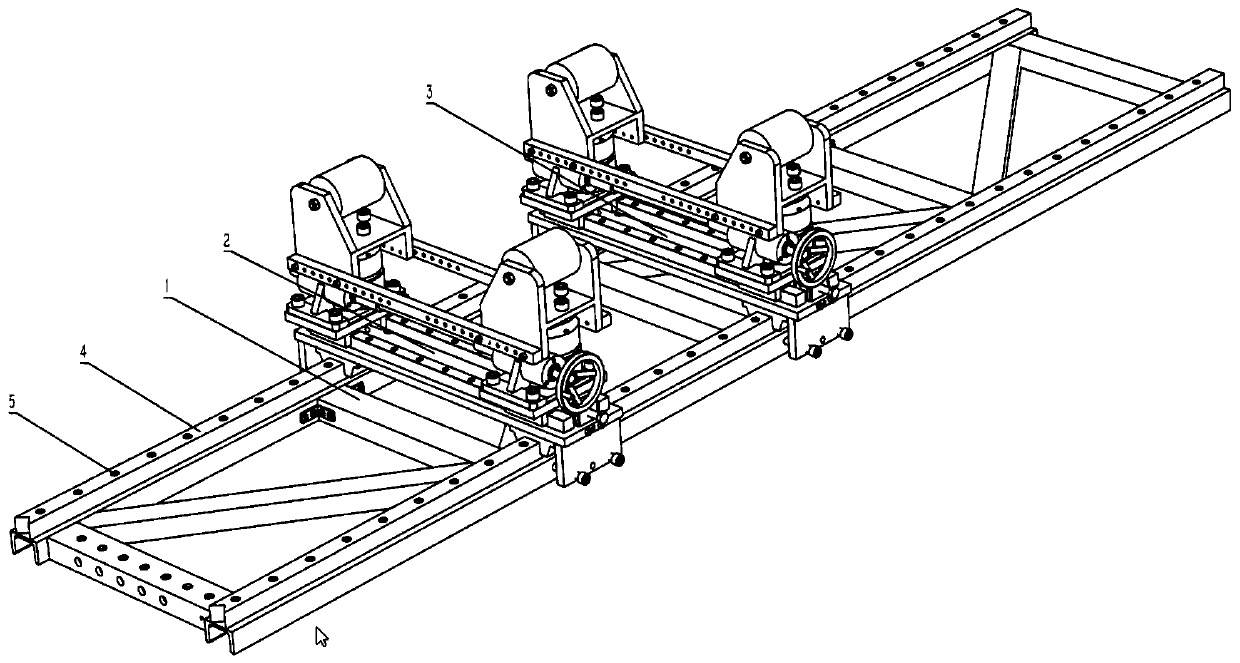
[0023] A cabin assembly and docking platform for an autonomous underwater vehicle, including a first-level platform 1, an attitude adjustment mechanism a2, an attitude adjustment mechanism b3, and a linear guide rail a4. The two linear guide rails a4 are parallel and symmetrically installed on the first-level platform 1. The attitude adjustment mechanism a2 and the attitude adjustment mechanism b3 are installed on the slider a14 of the linear guide rail 4, wherein the first-level platform 1 is processed after welding, and the flatness is guaranteed during welding, and the mounting holes of the two linear guide rails a4 are parallel and aligned during processing. unanimous.
[0024] The first-level platform 1 is fixedly placed on the test bench, and the first-level platform 1 can be docked and extended at the reserved interface according to the actual length of the autonomous underwater vehicle (AUV).
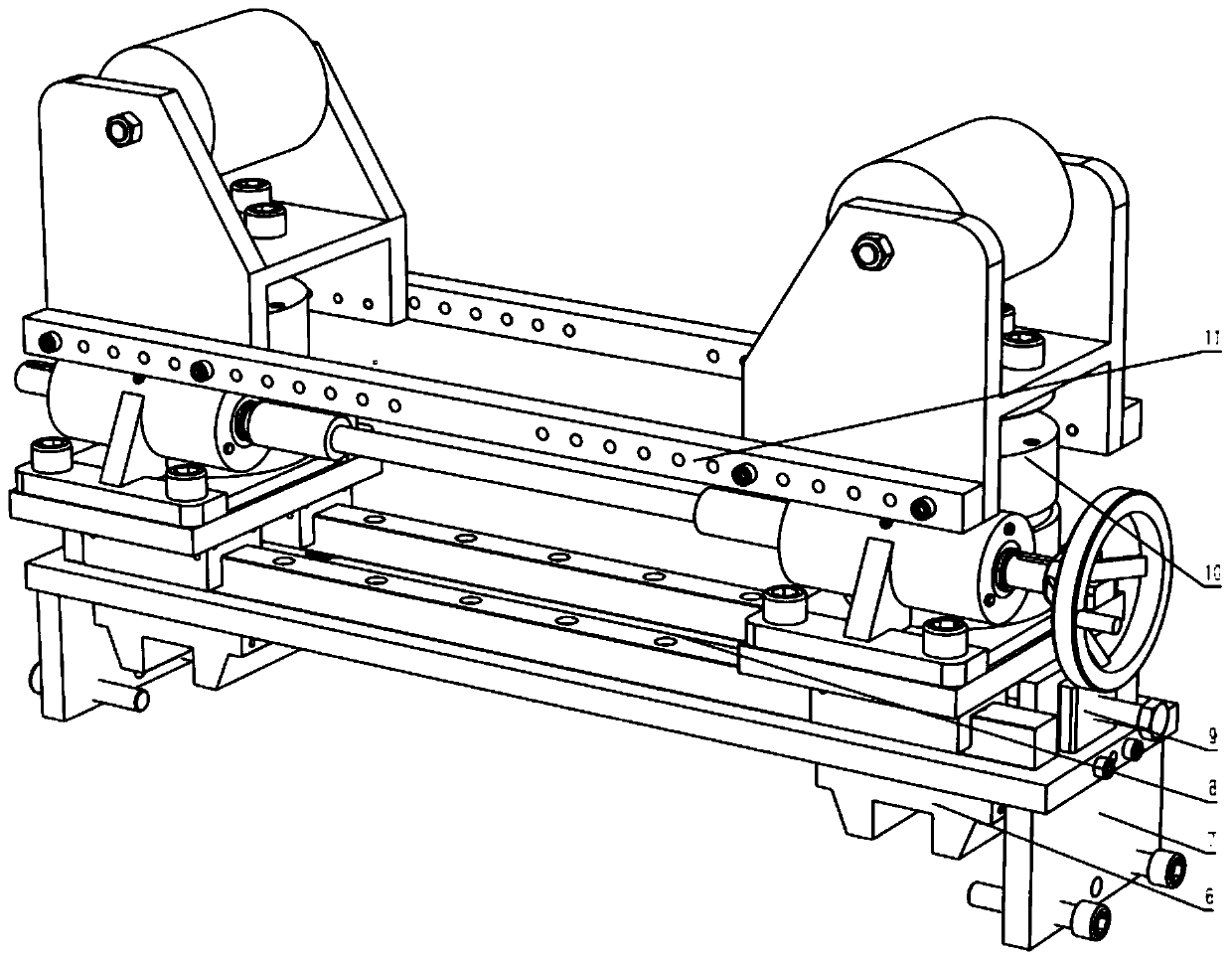
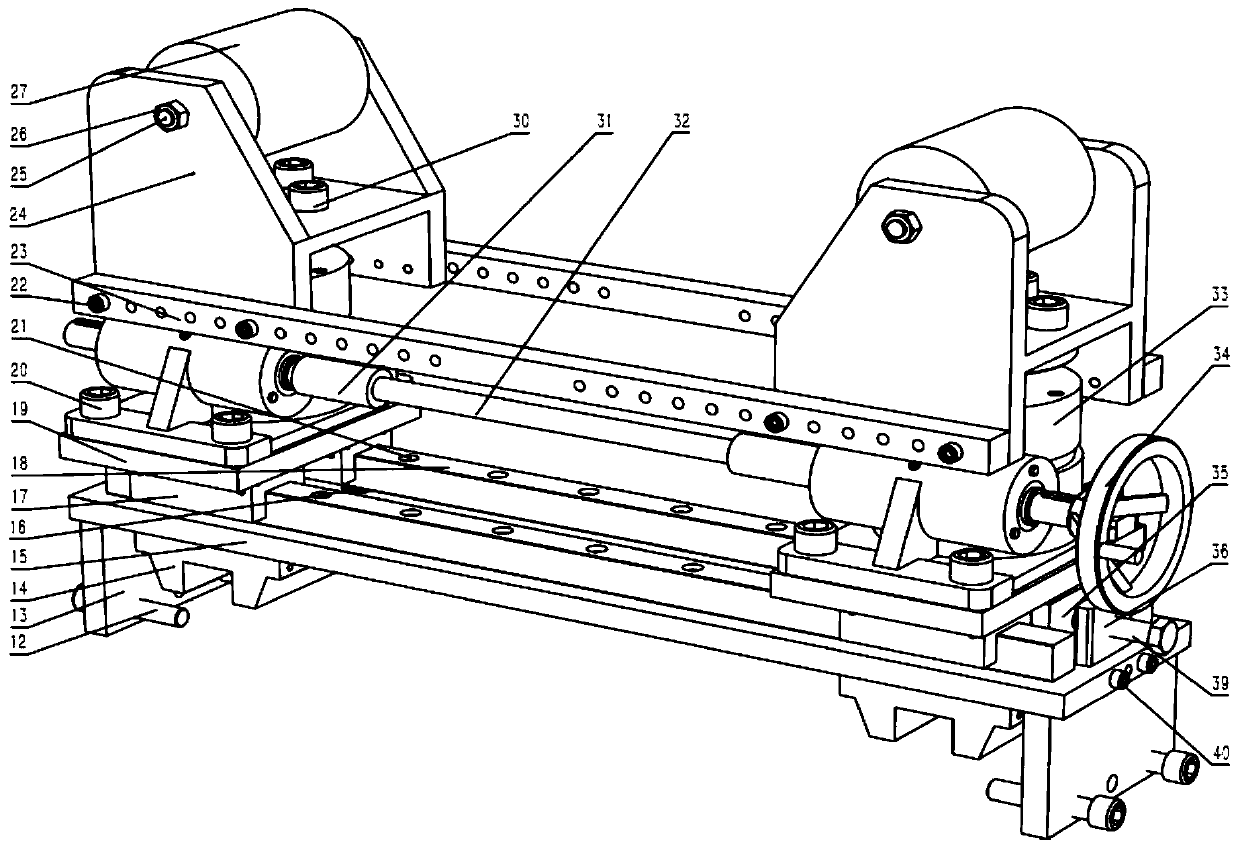
[0025] The attitude adjustment mechanism a2 includes a front and rear movem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More