

Human hand three-dimensional posture estimation method and device based on three-dimensional point cloud
A technology of 3D attitude and 3D point cloud, which is applied in the field of 3D attitude estimation by human hands, can solve the problems of high cost, unnatural interaction mode, and unguaranteed real-time performance, and achieve high precision, improved generalization ability, and high degree of automation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the above objects, technical solutions and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
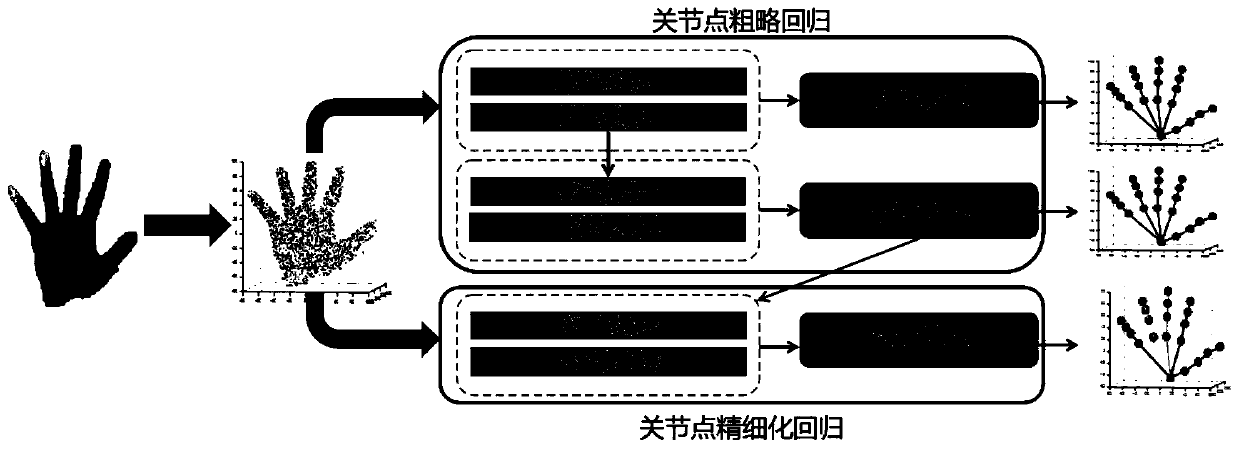
[0048] S1. This embodiment provides a method for 3D pose estimation of human hands based on 3D point clouds. The overall framework and process are as follows figure 1 As shown, the method includes the following steps:
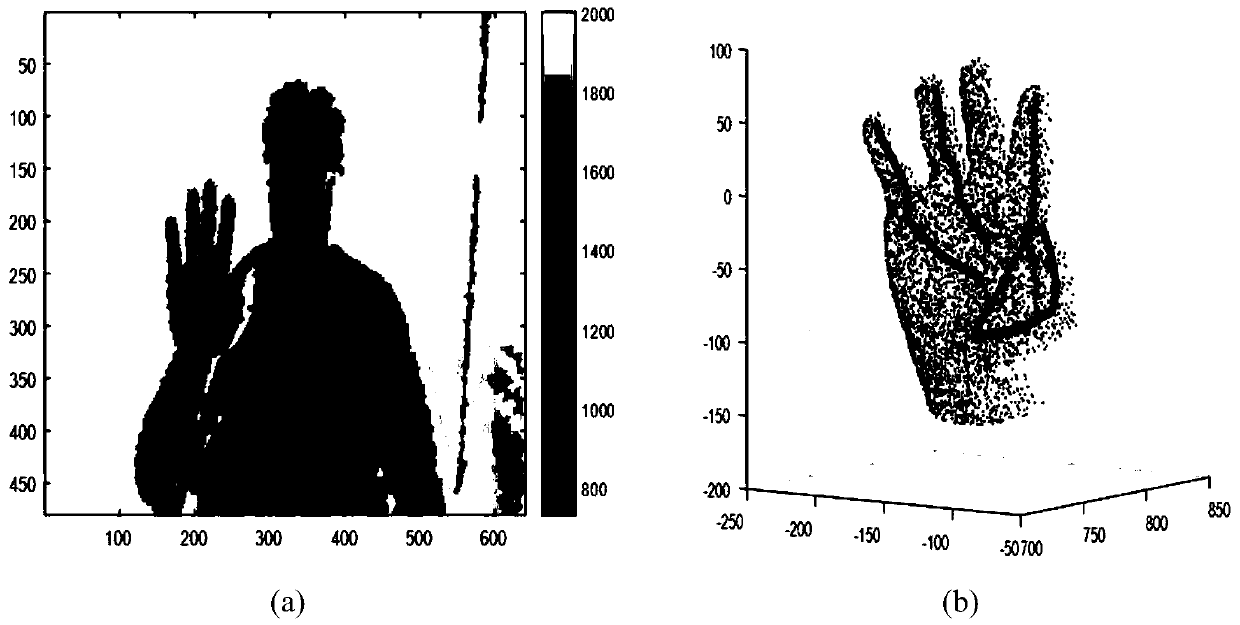
[0049] Step 1, preprocess the depth map data, and convert the depth map data into point cloud data according to the camera parameters.
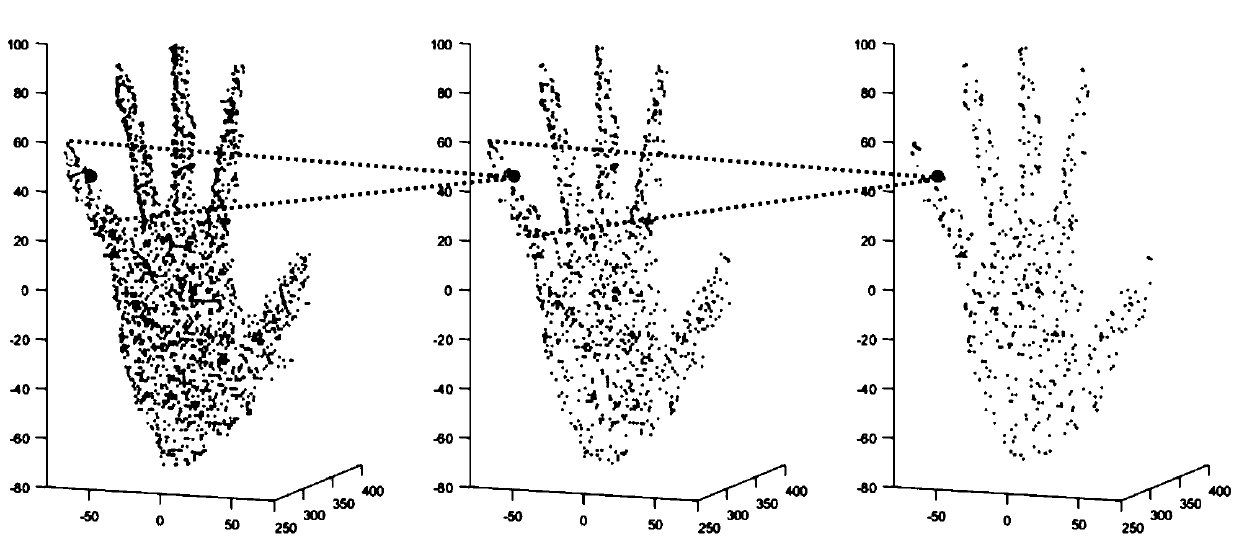
[0050] Step 2, and preprocessing the point cloud data, the preprocessing process is divided into downsampling, direction normalization and size normalization of the point cloud data.
[0051] Step 3: Input the point cloud data into the first-stage network (coarse regression network of joint points), use random sampling, clustering and multi-perceptron to extract features...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More