Target space positioning method and device based on neural network
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A neural network and spatial positioning technology, applied in the information field, can solve problems such as low processing efficiency, and achieve the effect of improving accuracy, realizing real-time positioning, and intuitive positioning.
Inactive Publication Date: 2019-10-15
WUHAN UNIV
View PDF4 Cites 11 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0006] In view of this, the present invention provides a neural network-based target space positioning method and device to solve or at least partially solve the technical problem of low processing efficiency existing in existing methods
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
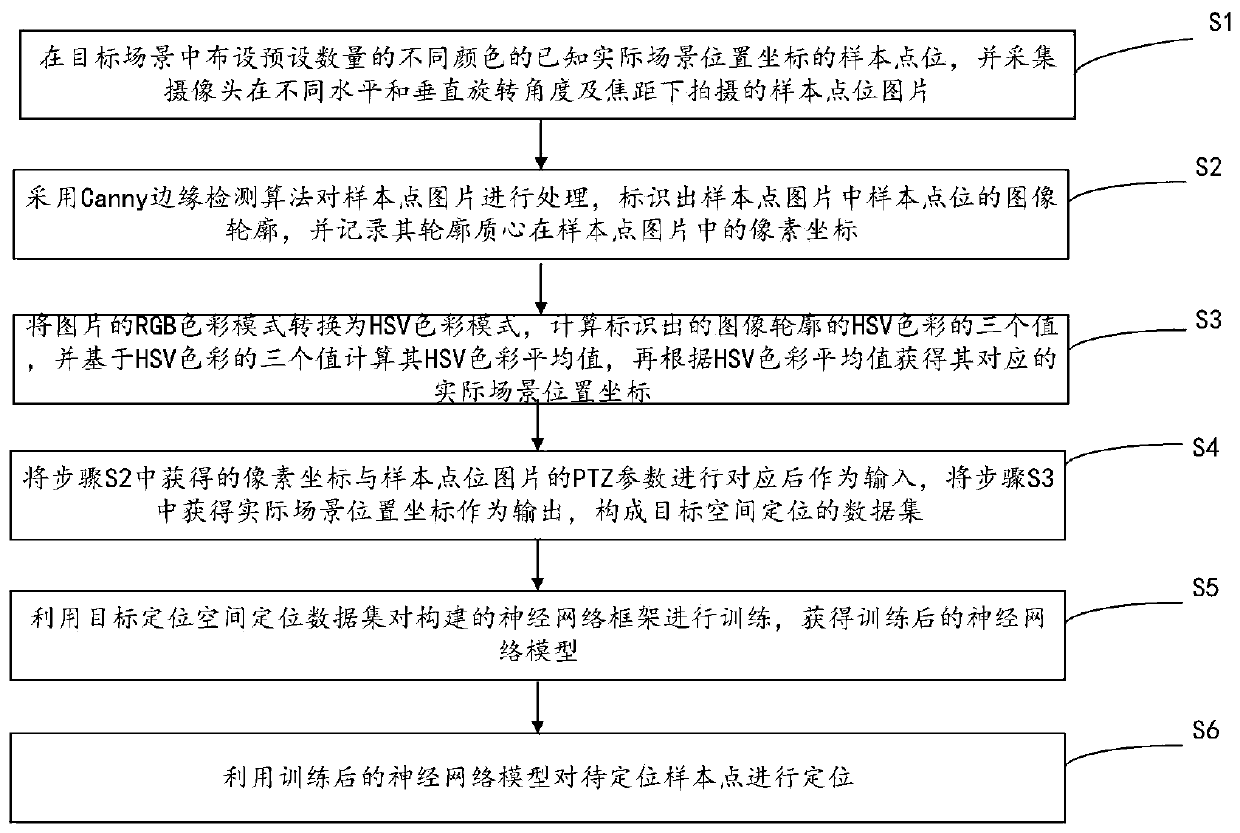
[0056] The embodiment of the present invention provides a neural network-based target space positioning method, please refer to figure 1 , the method includes:
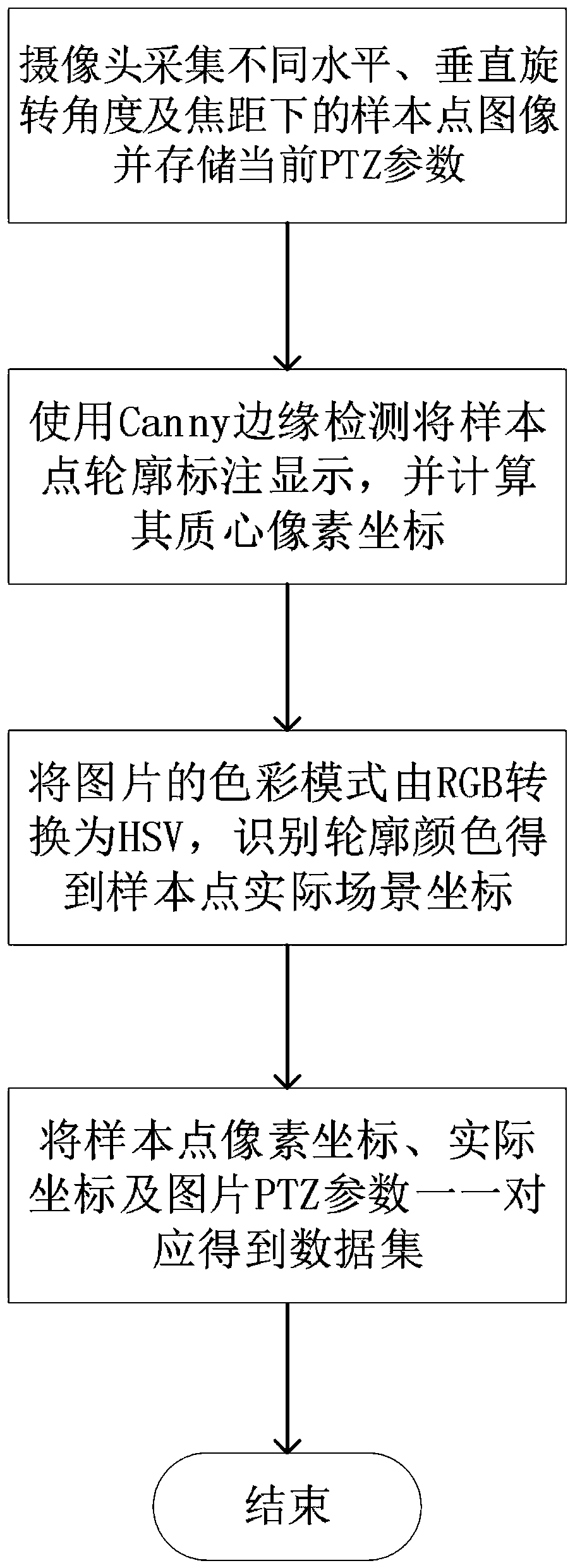
[0057] Step S1: Arrange a preset number of sample points with known actual scene position coordinates in different colors in the target scene, and collect pictures of the sample points taken by the camera at different horizontal and vertical rotation angles and focal lengths.
[0058] Specifically, the preset number can be set according to actual conditions. The sample points of known actual scene position coordinates of different colors mean that different colors correspond to different actual coordinates.
[0059] Such as Figure 4 As shown in the figure, paste the samples of circular sample points printed with black, white, gray, red, orange, yellow, green, blue, purple and other colors on the wall, and take photos at different camera angles. Then move the sample image continuously, and take photos of the sample...
Embodiment 2
[0113] This embodiment provides a neural network-based object space positioning device, please refer to Figure 8 , the device consists of:
[0114] The sample point picture collection module 201 is used to lay out a preset number of sample points with known actual scene position coordinates of different colors in the target scene, and collect sample points taken by the camera at different horizontal and vertical rotation angles and focal lengths bit picture;
[0115] Image contour identification module 202, for adopting Canny edge detectionalgorithm to process the sample point picture, identify the image contour of the sample point in the sample point picture, and record the pixel coordinates of its contour centroid in the sample point picture;
[0116] The color mode conversion module 203 is used to convert the RGB color mode of the picture into the HSV color mode, calculate the three values of the HSV color of the identified image outline, and calculate the HSV color av...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a target space positioning method and device based on a neural network. The target space positioning method, includes the steps: firstly, arranging some sample points on the space ground; recording sample point location pictures shot under different horizontal and vertical rotation angles and focal lengths through a camera; identifying the pixel coordinates of the sample point positions on the images shot by the camera; and performing one-to-one correspondence on the actual spatial coordinates and the actual spatial coordinates of the sample point locations to obtain multiple groups of training data, constructing and optimizing a BP neural network, inputting the training data into the neural network for training and verification to obtain a neural network model reaching an expected standard, and positioning a to-be-positioned sample point by using the neural network model. According to the invention, the accuracy and the efficiency of positioning and identifyingthe positioning points can be improved, and the technical effect of real-time positioning is realized.
Description
technical field [0001] The invention relates to the field of information technology, in particular to a neural network-based target space positioning method and device. Background technique [0002] At present, hardware-based target positioning at home and abroad includes Bluetooth, Wi-Fi, and ultra-wideband. These methods have high requirements for hardware and require a large number of devices in the monitoring scene. relatively simple. [0003] The traditional positioning method of surveillance video is mainly divided into monocular vision positioning and binocular vision positioning according to the different cameras. Internal and external parameters, construct a mathematical model between the actual object in space and the camera to calculate the actual position of the target point. [0004] In the process of implementing the present invention, the inventor of the present application found that the method of the prior art has at least the following technical problems:...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More