Calibration method for joint transmission ratio error of industrial tandem robot
A technology of error calibration and robotics, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of cumbersome identification operations and poor accuracy, achieve high calibration accuracy, fast speed, and improve the effect of absolute positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
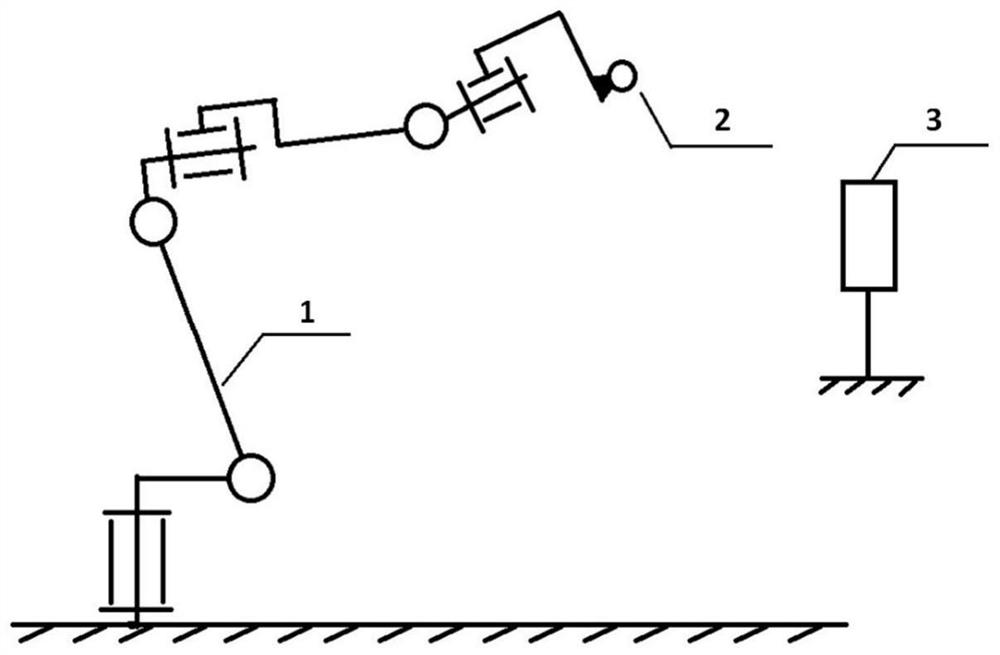
[0048] Such as figure 1 , figure 2 The illustrated embodiment is a joint transmission ratio error calibration method of an industrial tandem robot, including an industrial tandem robot 1, a robot controller, a computer, a laser tracker 3 and a tooling for installing a laser target 2; an industrial tandem robot and a robot controller Data connection, the computer is respectively connected to the robot controller and the laser tracker data; the tooling for installing the laser target is fixedly connected to the end of the robot; including the following steps:
[0049] Step 100, the robot runs to m positions in the flexible workspace
[0050] According to GB / T12642, select any m position points in the cube in the flexible working space of the industrial robot, and the robot controller controls the end of the robot to reach the selected m position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com