

Inertial navigation positioning system and positioning method for underground mining mobile device
A mobile device and inertial navigation technology, applied in the field of navigation and positioning, can solve problems such as accumulated errors, inaccurate detection results, and impact on target analysis and speed detection of mining mobile devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be described below in conjunction with specific embodiments and with reference to the drawings.
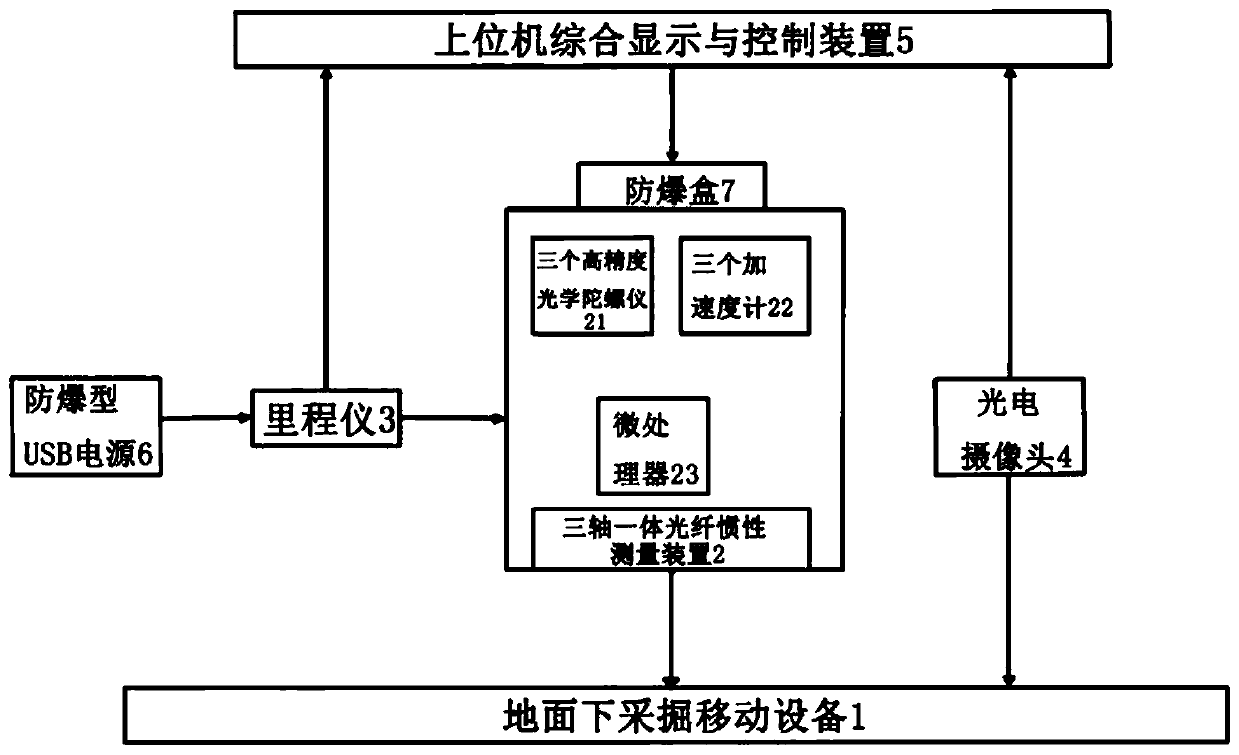
[0073] Kind of like figure 1 The shown inertial navigation and positioning system for underground mining mobile equipment includes a three-axis integrated optical fiber inertial measurement device 2. The three-axis integrated optical fiber inertial measurement device 2 consists of three high-precision optical gyroscopes 21, three accelerometers 22, and a microprocessor 器23 constitutes.
[0074] The three high-precision optical gyroscopes 21 are inertial-grade optical gyroscopes with a random drift stability of 0.01° / h. The use of high-precision inertial-grade optical gyroscopes not only meets the positioning accuracy requirements of underground mining mobile equipment, but is also conducive to cost Control, three accelerometers 22 are scale factor stability of 10 -4 An accelerometer of the order of mv / g. The accelerometer uses the geomagnetic line as a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More