

Time synchronization algorithm based on loosely coupled IMU array navigation system
A navigation system and time synchronization technology, which is applied in directions such as navigation through speed/acceleration measurement, and can solve problems such as large amount of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
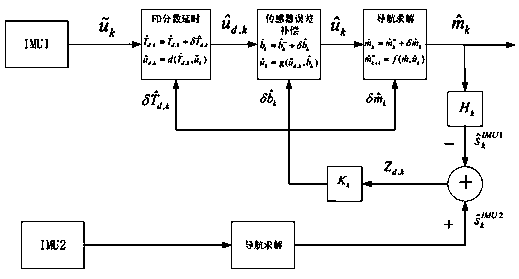
[0070] The time synchronization algorithm based on the loosely coupled IMU array navigation system of the present invention comprises the following steps:
[0071] Step 1. Set the time synchronization error to T in the IMU array navigation system d , the sampling period of the inertial sensor is T s , and the offset and drift rate between the clocks in the system have been compensated, only the initial offset between the clocks is unknown, that is, the time synchronization error is considered to be constant;
[0072] Step 2. Establish the error equation of the IMU array navigation system, select the error amount between each navigation subsystem as the state quantity, and establish the indirect method filtering based on the Kalman filter. The input of the Kalman filter is the pair of two inertial navigation systems. The difference between the measured output of the same navigation parameter is calculated through iterative filtering to estimate the amount of each error;
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More