Vehicle security anti-collision control method based on TTC of rolling optimization parameters
A rolling optimization and safety technology, applied to control devices, combustion engines, complex mathematical operations, etc., can solve the problems of driver's preview algorithm error, large amount of calculation, unfavorable judgment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be further described below in conjunction with the accompanying drawings.
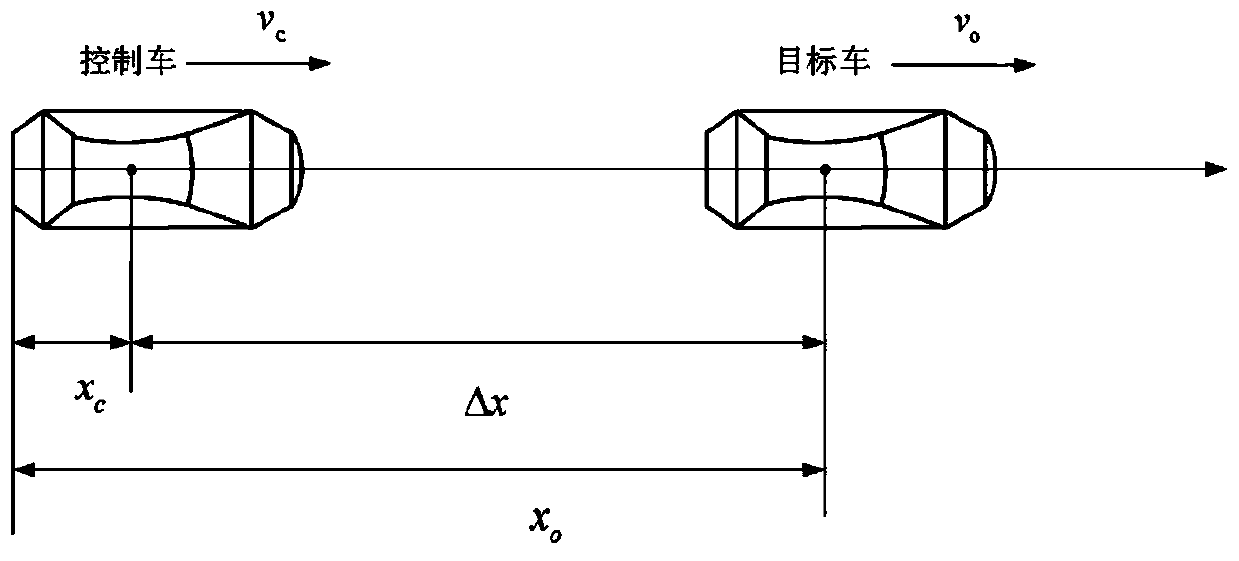
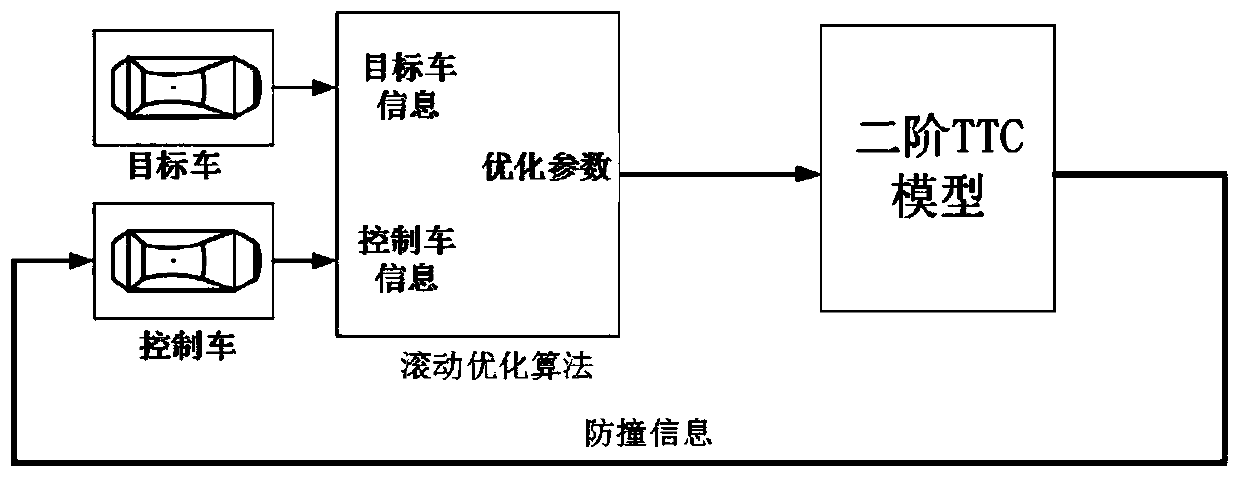
[0082] The present invention mainly optimizes the parameters of the second-order TTC so that each parameter can obtain parameters with better performance and good robustness under the action of the objective function and constraint conditions. Such as figure 1 As shown, through the analysis of the position relationship between the control vehicle and the target vehicle, the position distance relationship between the two vehicles is obtained, and the discrete kinematics equation is obtained by combining the velocity and acceleration formulas. The state-space model is constructed by analyzing the discrete kinematic equations.
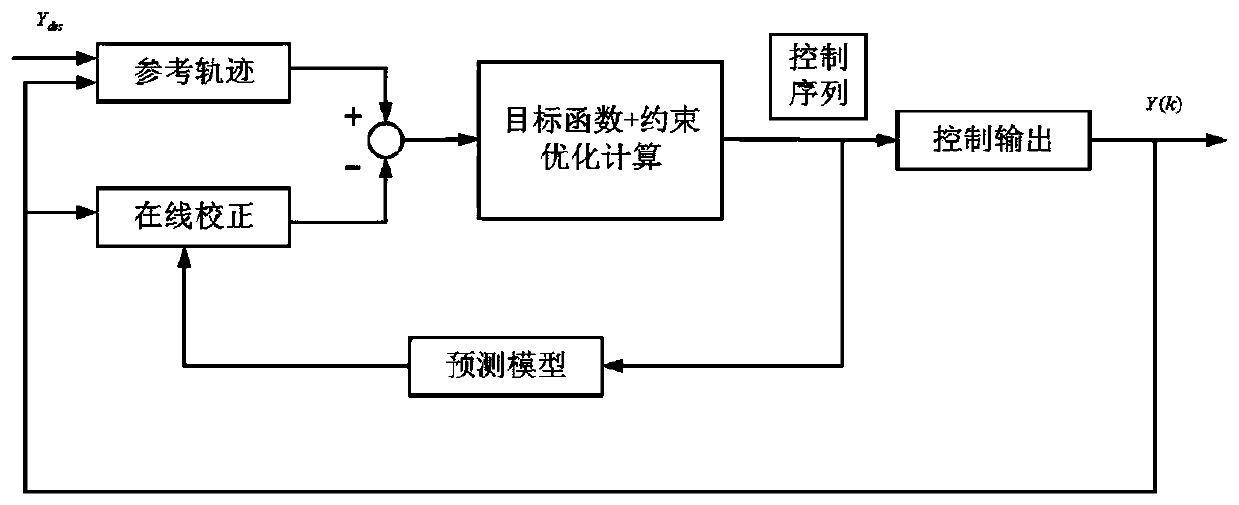
[0083] Such as figure 2 As shown, by predicting the state space model, the data of the control vehicle at the next moment is obtained, and after online feedback correction, it is compared with the reference trajectory data to obtain the objecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More